Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
(__) É como um computador pessoal, PC, podendo-se usar sistema operacional baseado em Windows ou Linux, como o Ubuntu.
(__) É equipado com interfaces de entrada e saída especiais para a conexão de sensores e atuadores industriais.
(__) Por ser um dispositivo digital, não é capaz de processar sinais analógicos.
(__) Para controlar processos industriais, o CLP requer um grande número de relés para a realização de comparações e análises lógicas.
(__) Os programas ou softwares de controle gravados em um CLP devem ser regravados no caso de o dispositivo ter permanecido desligado por vários dias.
A sequência correta é
Observe a seguinte equação.

Para o sistema dinâmico mostrado na equação acima, assinale a alternativa que representa uma
realização de estado válida para quando o vetor de estado é definido como: 

A função de transferência correta é

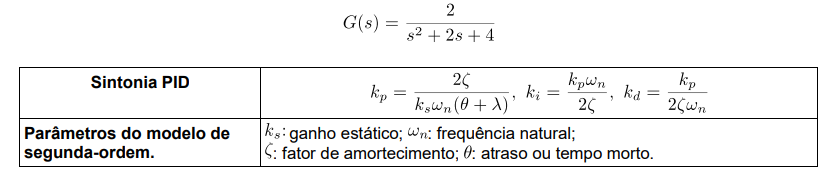
Os ganhos kp, ki, kd, que sintonizam esse controlador PID são:
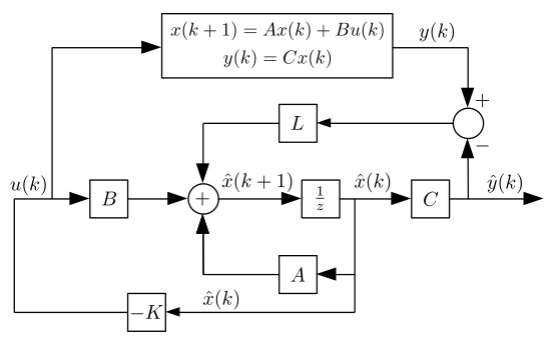
Em relação ao diagrama, assinale V (verdadeiro) ou F (falso) nas alternativas seguintes.
(__) A dinâmica de malha fechada pode ser descrita por x (k +1) = Ax (k) - BK x̂ (k).
(__) O estimador de estado é descrito por x̂ (k) = (A - LC) x̂ (k - 1) + Bu (k - 1).
(__) Os autovalores da matriz A devem estar contidos no círculo unitário do plano z.
A sequência correta é

Com base no diagrama da figura, a margem de ganho e a margem de fase são, respectivamente:
Considere o controlador Proporcional-Integral mostrado a seguir.

Operando com um período de amostragem Ts, a síntese digital desse controlador obtida pela
aproximação Backward,  é descrita pela seguinte equação a diferenças no tempo discreto K:
é descrita pela seguinte equação a diferenças no tempo discreto K:
Na figura a seguir, mostra-se a resposta ao degrau unitário de um sistema dinâmico.

O modelo representativo desse sistema é
Observe a equação abaixo.

Em relação ao sistema dinâmico mostrado na equação, assinale V (verdadeiro) ou F (falso) nas afirmativas a seguir.
(__) É assintoticamente estável.
(__) Sua resposta ao degrau é sobreamortecida.
(__) É de fase mínima.
(__) Não é causal.
A sequência correta é
O sistema está sujeito a um sinal de entrada em degrau unitário. Nesse contexto, assinale o erro de estado estacionário para um determinado valor de K.
A transformada de Laplace é uma importante ferramenta utilizada na análise de sinais e sistemas. Considere a função f (t) = 2 e -3t - e -4t.
A transformada de Laplace de f (t) é dada por

Nessa equação, existe uma relação de entrada tensão v(t) e saída intensidade de corrente i(t) conhecida como função de transferência, que tem como resultado a característica do sistema. Ao aplicar a transformada de Laplace nessa equação, é obtida a sua equivalência no domínio da frequência, permitindo uma melhor análise e resolução. A equação equivalente é