Para o sistema dinâmico G(s) da equação, determine os ganhos...
Próximas questões
Com base no mesmo assunto
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270284
Engenharia de Automação
Para o sistema dinâmico G(s) da equação, determine os ganhos kp, ki, kd, do controlador Proporcional-Integral-Derivativo (PID), usando a tabela de sintonia baseada nos parâmetros de um modelo de
segunda-ordem para quando 
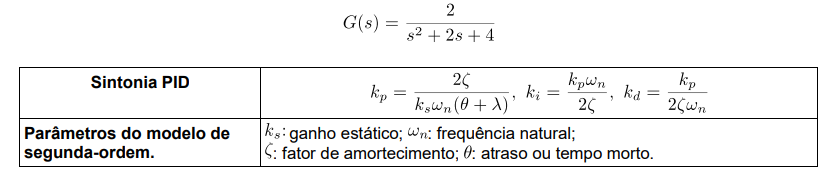
Os ganhos kp, ki, kd, que sintonizam esse controlador PID são:
Os ganhos kp, ki, kd, que sintonizam esse controlador PID são: