Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
Julgue o item seguinte, a respeito de elementos finais de controle e seus acessórios.
Em um processo industrial, elementos finais de controle são
utilizados na regulação do fluxo de fluidos de modo a se
manter variáveis como pressão, temperatura, fluxo, entre
outras, dentro de limites desejados.
Considere A uma matriz quadrada ortogonal qualquer não nula.
Com relação a essa matriz, observa-se que
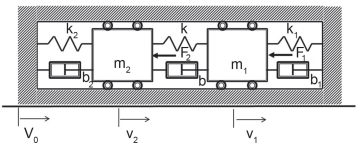
A matriz de amortecimento desse sistema é dada por
Considere a função de transferência padrão de um sistema dinâmico de 2a ordem, com um zero na origem
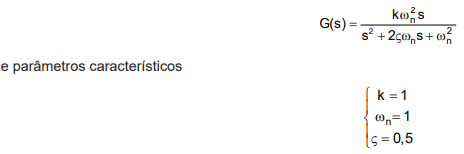
Supondo-se condições iniciais nulas, a resposta no tempo desse sistema a uma rampa unitária aplicada no instante de
tempo t = 2 segundos é
yi+1 = yi + h f(xi , yi )
Essa fórmula de recorrência descreve um método numérico para solução computacional de equações diferenciais.
Tal método é o de
O Teorema da Derivada da Transformada de Laplace estabelece que
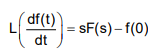
Assim sendo,  é igual a
é igual a
Considere que dois elementos dinâmicos são acoplados com transferência de potência entre eles.
O efeito descrito acima é o de
Suponha um elemento dinâmico cuja relação entre as variáveis de potência seja dada por

na qual k é uma constante dependente das propriedades físicas e geométricas do elemento.
Esse elemento dinâmico é um

Considere que há conservação de potência na transferência da potência do domínio 1, associado às variáveis (e1 , f1 ), para o domínio 2, relacionado às variáveis (e2 , f2 ), quando tais domínios são acoplados pelo girador.
Qual é a relação entre ke e kf ?
Considere o diagrama de blocos abaixo.
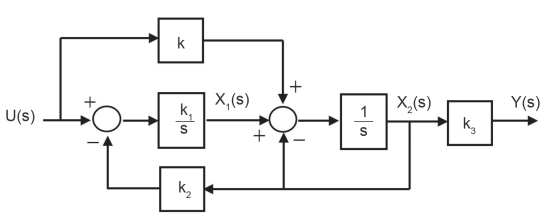
O modelo de estado associado ao diagrama de blocos é o seguinte:
Considere a FT de um controlador PID contínuo
e T o período de amostragem empregado no ZOH/SOZ do conversor A/D conectado ao controlador.
Nesse contexto, a FT do PID discreto equivalente ao
contínuo é:
Considere o modelo de estado
no qual dim [A] = n × n, dim [B] = n × m, dim [C] = r × n e dim [D] = r × m.
A condição de observabilidade completa é garantida se e
somente se o posto da matriz de observabilidade é igual
a(ao)
Considere a função de transferência de malha aberta na qual |z|>|p|
k(s + z) / s(s + p)(s2 + 2ps + p2 + 2p)
Considere a construção de uma malha fechada com esse sistema no seu ramo direto e realimentação unitária, e que k1 e k3 são ganhos para os quais a malha fechada possui polos reais iguais, e k2 é o ganho no qual a malha fechada passa a ser instável.
Considerando-se k1
< k2
< k3
, conclui-se que modos superamortecidos estarão presentes na resposta dinâmica
estável dessa malha fechada para
O sistema de malha fechada descrito acima é
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Uma das possíveis inconsistências que devem ser evitadas são as malhas