Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
Considere o sistema discreto no tempo descrito por:
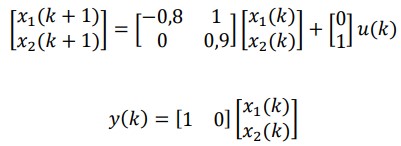
Sobre esse sistema, é correto afirmar que é:
Um sistema de controle de nível é representado abaixo, em que a variável manipulada é a abertura da válvula u(t) e a variável controlada é o nível do tanque y(t).
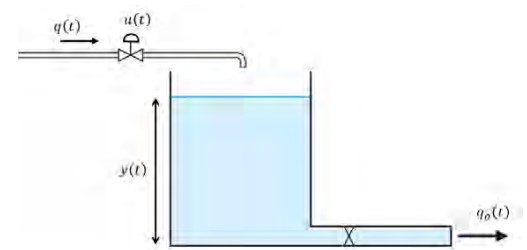
Adaptado de DORF, Richard C.; BISHOP, Robert H. Sistemas de Controle Modernos. 12. ed. Rio de Janeiro: LTC, 2013.
O reservatório possui formato cilíndrico com área da base A1, a tubulação de saída é aberta à atmosfera, com área da seção transversal A2, em que A2 ≪ A1. A vazão de entrada e de saída é denotada, respectivamente, por q(t) e q0 (t).
Analise as afirmativas sobre a modelagem desse sistema.
I. Trata-se de um sistema não linear, pois a vazão de saída q0 (t) depende da raiz quadrada do nível. O sistema pode ser linearizado em torno de um ponto de operação por meio da expansão em série de Taylor.
II. A função de transferência aproximada do sistema é marginalmente estável, com ao menos um polo na origem, devido à característica de sistema integrador relacionada à presença do reservatório.
III. Um modelo mais realista deve inserir efeitos de saturação da variável manipulada, uma vez que a válvula de controle não pode assumir valores negativos e nem exceder sua abertura de 100%.
IV. São exemplos de perturbação e variação paramétrica, respectivamente, a variação da pressão da linha de entrada e a alteração da massa específica do fluido, uma vez que nenhum fluido é perfeitamente incompressível.
Estão corretas as afirmativas:
A resposta em frequência de um sistema de fase nula H (jω) é representada abaixo.
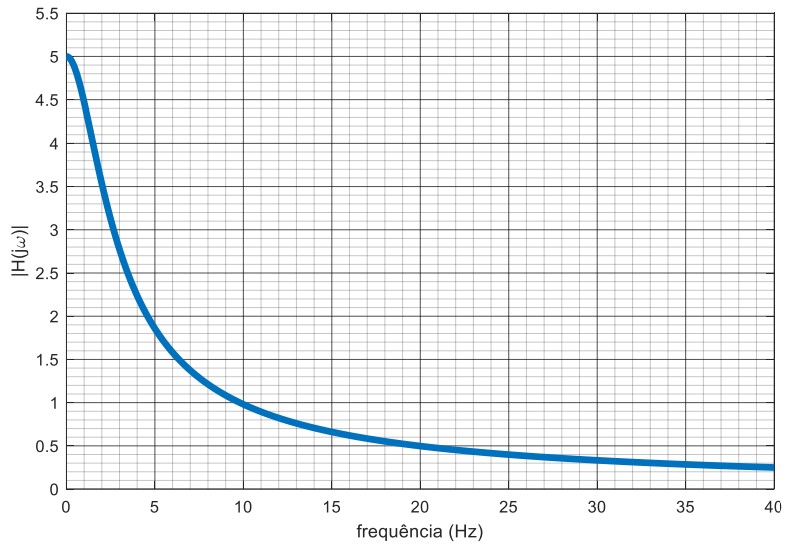
Um sinal x (t), dado por:

é aplicado na entrada do sistema, gerando o sinal de saída y(t).
Selecione a alternativa que especifica corretamente o sinal y(t).
O diagrama de Bode de um sistema G(s) é apresentado a seguir.
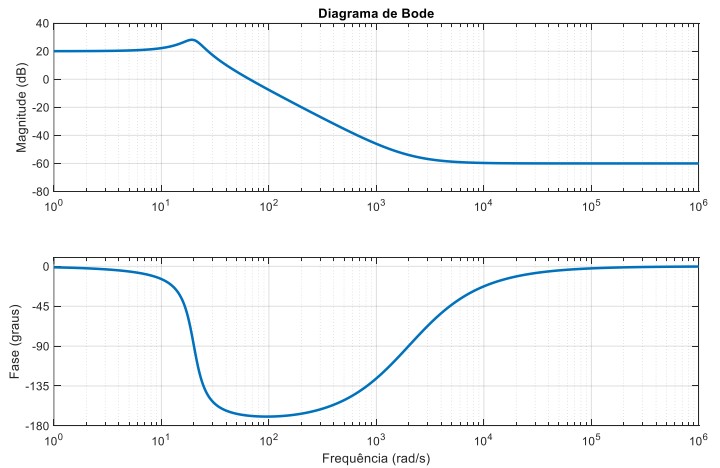
Com base no diagrama de Bode apresentado, a função de transferência ????(????) é dada por:
Analise os diagramas de blocos de três sistemas amostrados conforme abaixo.
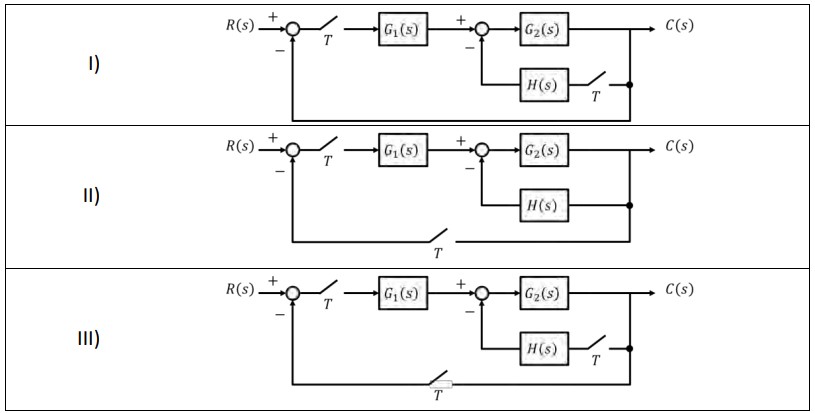
Para análise de sistemas amostrados, é comum obter a função de transferência de malha fechada no domínio z. Sobre a função de transferência C(z) / R(z) dos diagramas de blocos apresentados, é possível afirmar que:
Considere o sistema de controle apresentado na figura abaixo.
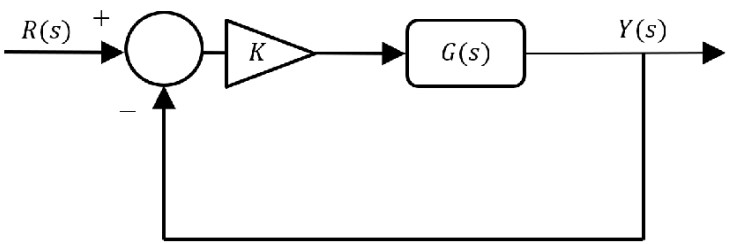
O diagrama de Bode do sistema com função de transferência G(s) é exibido na figura a seguir.
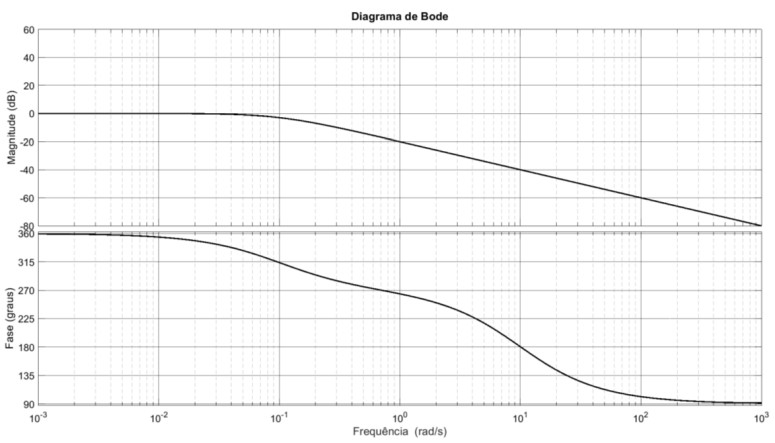
Considerando-se que o ganho K do controlador proporcional foi projetado para que o erro em regime permanente para uma entrada R(s) em degrau unitário seja menor que 10%, assinale a alternativa cujos valores das margens de fase e de ganho de KG(s) mais se aproximam dos valores corretos.
Considere o sistema de malha fechada com um controlador do tipo PI, conforme apresentado na figura abaixo.
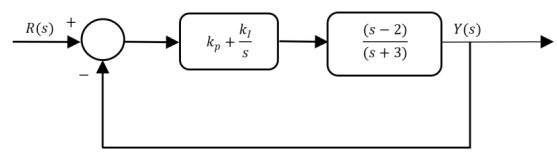
As faixas de valores para os ganhos kp e kI para as quais o sistema de malha fechada é estável são:
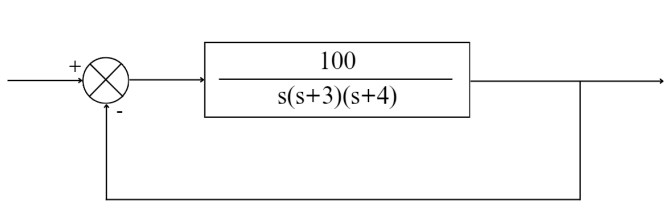
Considere o sistema de controle apresentado na figura abaixo.
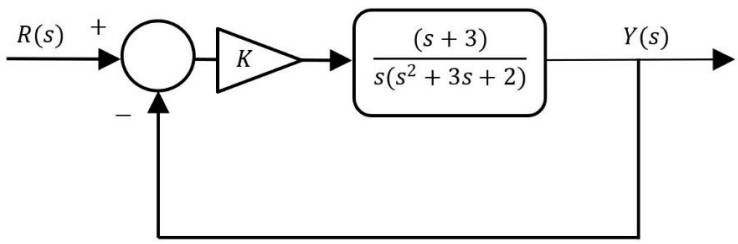
O gráfico do Lugar das Raízes referente ao sistema, para K > 0, representado na figura acima é:
Considere o sistema de malha fechada com o diagrama de blocos apresentado na figura abaixo.
Sobre esse sistema em malha fechada, compreende-se que:
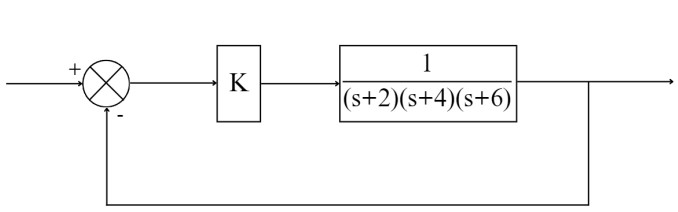
Considere o sistema de controle em malha fechada representado pela figura abaixo. Sobre o efeito do ganho K no diagrama do lugar geométrico das raízes, assinale a alternativa incorreta:
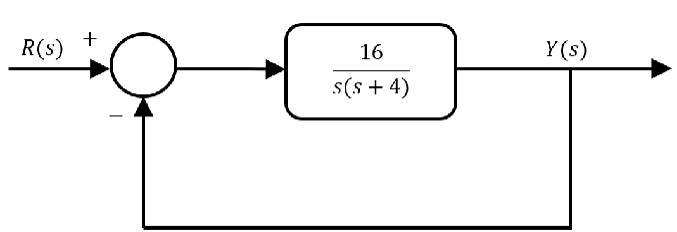
Considere o sistema em malha fechada representado pela figura abaixo.
Sobre o erro em regime permanente para o sistema acima, é incorreto afirmar que:
A Figura abaixo ilustra o plano de Argand-Gauss de três sistemas de 2ª ordem subamortecidos, cujos polos estão numerados com representações aos sistemas. Considerando que os ângulos dos polos em relação ao eixo σ são os mesmos para todos os sistemas, assinale a alternativa correta:
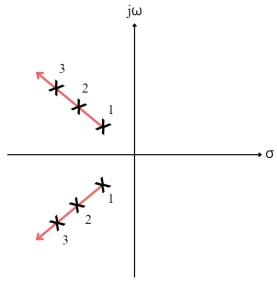
I - A resposta ao degrau dos três sistemas apresenta a mesma ultrapassagem percentual (overshoot), pois o fator de amortecimento dos três sistemas é o mesmo.
II - A resposta ao degrau do terceiro sistema apresenta o menor tempo de pico, pois os seus polos apresentam maior frequência de oscilação amortecida ωd.
III - A resposta ao degrau do primeiro sistema apresenta o maior tempo de acomodação (estabilização), pois os seus polos apresentam menor frequência de amortecimento exponencial (ou magnitude da parte real) σd.
IV - A frequência natural ωn do terceiro sistema é a mais elevada. Considerando que o fator de amortecimento é o mesmo, uma vez que o ângulo dos polos em relação ao eixo real é igual, a resposta ao degrau do terceiro sistema apresenta o menor tempo de subida.
A Figura abaixo ilustra o plano de Argand-Gauss onde os pólos A, B e C (assinalados com X) se encontram representados. Esses polos são dados pela expressão s = σ + jω.
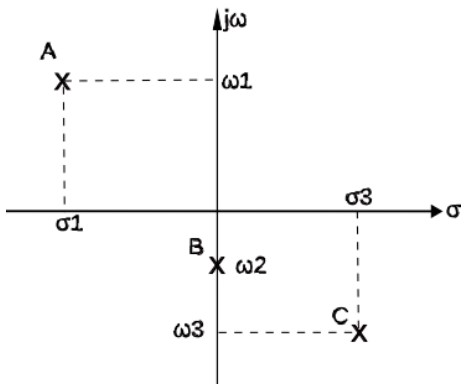
Ao se realizar a Transformada Z, em que z = eTs e T é o período de amostragem, o mapeamento desses polos no novo plano complexo é tal que:
O gráfico abaixo ilustra um degrau unitário u(t).
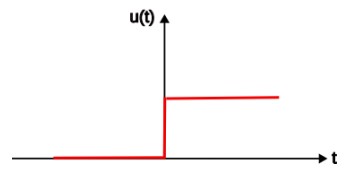
Modificações nessa função resultam em novos sinais, representados a seguir:
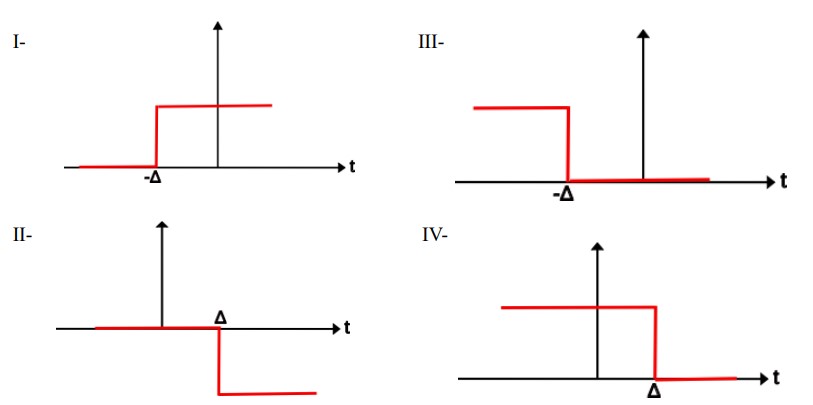
Marque a opção correta:
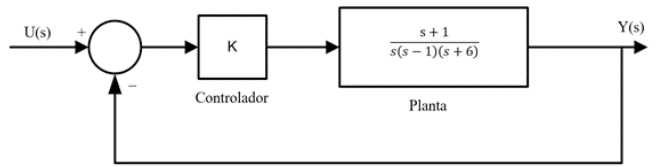
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
Fonte: IFSP, 2024
Um engenheiro de automação está desenvolvendo um sistema de controle para ajustar a temperatura de um forno industrial. Devido à complexidade das variações térmicas e às incertezas do processo, foi decidido utilizar um controlador fuzzy para otimizar o desempenho do sistema. Além disso, o engenheiro quer integrar técnicas de aprendizado de máquina para que o controlador possa se adaptar dinamicamente às condições do forno.
Com base nessa situação, qual das opções abaixo descreve corretamente uma vantagem da utilização de um controlador fuzzy adaptativo em comparação a um controlador fuzzy clássico?