Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
Q3852262
Engenharia de Automação
Um sistema com equação de estados:
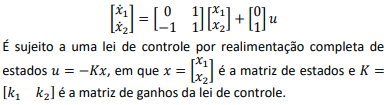
Os valores dos ganhos k1 e k2 para que o sistema em malha fechada tenha polos duplos em −2 são, respectivamente
Q3852261
Engenharia de Automação
Considere um controlador proporcional integral com função de
transferência D(s) = kp + ki/s em série com uma planta com função
de transferência G(s) = (s+2)/(s2 + 3s + 4) numa malha de
realimentação unitária negativa.
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é
Q3852260
Engenharia de Automação
Seja um compensador de avanço de fase com função de
transferência D(s) = (s + z)/(s + p), em que z e p são reais positivos
e, correspondem, respectivamente, às frequências de quebra do
zero e do polo do compensador na sua resposta em frequência,
avaliada em radianos por segundo.
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
Q3852259
Engenharia de Automação
Considere o traçado do lugar das raízes para o sistema com função
de transferência G(s) = 1/(s3 + 6s2 + 25s) em série com um ganho
real positivo numa malha de realimentação unitária negativa.
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
Q3852258
Engenharia de Automação
Considere a planta G(s) = 1/(s3 + 6s2 + 5s) em série com um ganho
proporcional kp positivo numa malha de realimentação negativa
unitária.
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
Q3852257
Engenharia de Automação
Considere a expansão em frações parciais da função de
transferência G(s) = (s+5)/(s2 + 7s + 12) em termos de primeira
ordem da forma A1/(s+p1) + A2/(s+p2) em que -p1 e -p2 são os polos
de G(s) e A1 e A2 são os respectivos coeficientes dos termos da
expansão.
O valor do coeficiente correspondente ao polo de maior valor absoluto é
O valor do coeficiente correspondente ao polo de maior valor absoluto é
Q3852255
Engenharia de Automação
Considere um sistema de controle digital cuja função de
transferência do sistema em malha aberta é dada pela seguinte
expressão:
G(z) = z - 0,5 / z - 0,9
O erro em regime permanente desse sistema a uma entrada degrau é, aproximadamente
G(z) = z - 0,5 / z - 0,9
O erro em regime permanente desse sistema a uma entrada degrau é, aproximadamente
Q3852253
Engenharia de Automação
Simulações Hardware In The Loop (HIL) são bastante utilizadas
atualmente para permitir um ciclo mais rápido de
desenvolvimento de produtos.
Analise os itens a seguir a respeito de Simulações Hardware in The Loop:
I. Necessitam de um Simulador de Tempo Real com capacidade de processamento compatível para que possam simular a planta em tempo real.
II. Não necessitam de uma modelagem matemática representativa da planta a ser simulada para que as simulações sejam efetivas.
III. São amplamente utilizados na indústria aeroespacial, automobilística e em eletrônica de potência.
É correto o que se afirma em
Analise os itens a seguir a respeito de Simulações Hardware in The Loop:
I. Necessitam de um Simulador de Tempo Real com capacidade de processamento compatível para que possam simular a planta em tempo real.
II. Não necessitam de uma modelagem matemática representativa da planta a ser simulada para que as simulações sejam efetivas.
III. São amplamente utilizados na indústria aeroespacial, automobilística e em eletrônica de potência.
É correto o que se afirma em
Q3852252
Engenharia de Automação
Considere um circuito RC paralelo, em que uma fonte de
alimentação de 50V em série com uma chave SW1, alimenta um
resistor R de 10 ohms e um capacitor C de 100mF em paralelo.
Após um longo período com a chave SW1 fechada, a chave é
aberta.
O módulo da corrente que passa pelo resistor R no instante imediatamente após a abertura da chave e 6s após a abertura, respectivamente, são, aproximadamente
O módulo da corrente que passa pelo resistor R no instante imediatamente após a abertura da chave e 6s após a abertura, respectivamente, são, aproximadamente
Q3851252
Engenharia de Automação
Em um sistema de controle de temperatura de um forno industrial,
o controlador compara a temperatura desejada (setpoint) com a
temperatura atual medida pelo sensor e ajusta a potência do
aquecedor.
No cenário, foi descrito o sistema de controle
No cenário, foi descrito o sistema de controle
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093947
Engenharia de Automação
A característica de retroalimentação em um
manipulador robótico reflete diretamente no seu
sistema de controle no qual possui uma atuação
que pode ser descrita como
Ano: 2025
Banca:
VUNESP
Órgão:
ARSESP
Prova:
VUNESP - 2025 - ARSESP - Especialista em Regulação e Fiscalização de Serviços Públicos - Área de Conhecimento/Ênfases: Energia Elétrica |
Q3786035
Engenharia de Automação
Considerando a automação de um sistema de distribuição, assinale a alternativa que apresenta apenas componentes do sistema associados à automação.
Ano: 2025
Banca:
FUNCERN
Órgão:
IF-PE
Prova:
FUNCERN - 2025 - IF-PE - Professor EBTT - Eletrotécnica |
Q3680421
Engenharia de Automação
Em um diagrama funcional de um sistema de automação para uma linha de produção, o motor de uma esteira
(M1) só pode ser acionado, se uma chave de partida (S1) for acionada e uma chave de segurança (LS1)
indicar que o portão de proteção está fechado. Quando M1 é acionado, um relé de tempo (KT1) inicia a
contagem. Após um retardo programado, o relé KT1 fecha um de seus contatos para energizar a bobina de um
segundo contator (K2), que aciona um motor de bomba (M2). Se o botão de emergência (S0) ou a chave de
segurança (LS1) forem atuados, todo o sistema deve ser desligado. A lógica de controle indica que
Q3680357
Engenharia de Automação
Em uma linha de envase de bebidas, o controle da vazão de líquido em garrafas é feito por uma válvula
motorizada, cuja abertura é comandada por um controlador automático. O sistema pode ser representado por
um diagrama de blocos simplificado na figura a seguir, no qual o controlador C(s) atua sobre a válvula (atuador)
e esta influencia a dinâmica do fluxo, representada pela planta G(s). A medição da vazão é realizada por um
sensor com dinâmica própria H(s).
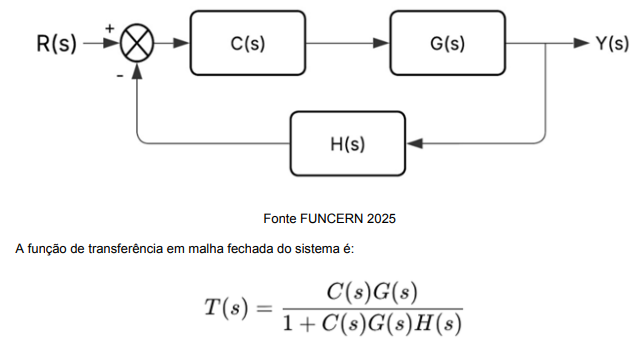
Com base no exposto, assinale a opção correta.
Com base no exposto, assinale a opção correta.
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
SANESUL
Prova:
INSTITUTO AOCP - 2025 - SANESUL - Técnico em Automação |
Q3539194
Engenharia de Automação
Uma bomba com motor trifásico foi instalada com
o objetivo de realizar a transferência entre dois
reservatórios de abastecimento de água. Para
garantir uma operação que varie a velocidade de
transferência do fluido, de acordo com o pico de
consumo de um do reservatório a jusante, qual
função de controle pode ser utilizada no inversor
de frequência?
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
SANESUL
Prova:
INSTITUTO AOCP - 2025 - SANESUL - Técnico em Automação |
Q3539186
Engenharia de Automação
Para evitar a oscilação da saída de um
controlador de temperatura quando o valor de
configuração é atingido, um técnico de
automação pode parametrizar um intervalo de
atuação no processo. Esse intervalo é conhecido
como
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270300
Engenharia de Automação
O circuito eletrônico mostrado a seguir permite implementar um controlador Proporcional-Integral, cuja
entrada é o sinal de erro e (t) e a saída é o sinal de controle u (t).
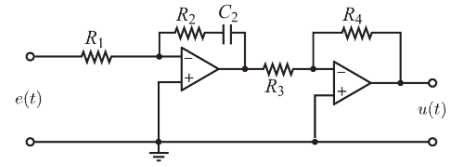
Sabendo que a função de transferência do circuito é dada por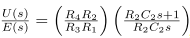 , assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
, assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
Sabendo que a função de transferência do circuito é dada por
, assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270297
Engenharia de Automação
Observe o diagrama a seguir.

Em relação ao diagrama de circuito mostrado acima, em que u é a tensão de entrada e y a de saída, assinale V (verdadeiro) ou F (falso) nas afirmativas seguintes.
(__) Se a relação entre os resistores for R2 > R1, o sinal de entrada é amplificado na saída.
(__) A configuração é de circuito tipo inversor.
(__) O ganho desse sistema é - R2 / R1.
A sequência correta é
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270290
Engenharia de Automação
Relativamente ao controlador lógico programável (CLP), é INCORRETO afirmar:
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270289
Engenharia de Automação
Sobre controlador lógico programável (CLP), é correto afirmar: