Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
Considere que o circuito abaixo é formado por resistores.
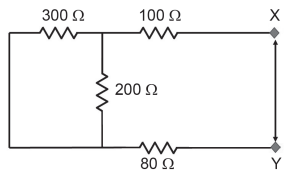
O valor, em Ω, da resistência equivalente vista entre os
terminais X e Y é
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
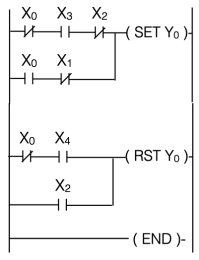
Analisando-se o programa, constata-se que o sistema em
Aumentando-se o ganho proporcional do PI, o amortecimento da malha fechada
Considere o sistema de controle em malha fechada, dado pelo diagrama de blocos a seguir.
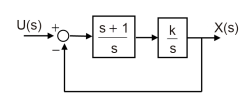
A função de transferência de malha fechada  é
é
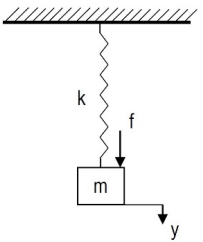
Considere uma função de transferência de um controlador PID, realizável por um circuito ou sistema analógico, na forma de polos e zeros finitos dependentes dos ganhos proporcional, integral e derivativo.
Essa função é dada por
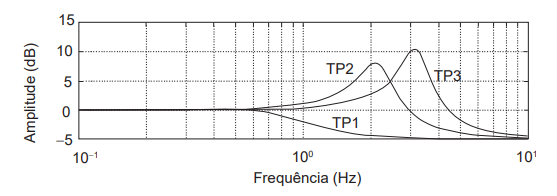
Considere que esse sistema será utilizado para medir sinais de pressão de pequena amplitude, com frequência em torno de 2 Hz.
Nesse caso, qual transdutor deverá ser utilizado?
Um técnico em instrumentação está orientando um estagiário. Durante a análise de um sinal de baixa frequência sobreposto com um ruído de alta frequência, o técnico questiona o estagiário sobre como poderia calcular a relação sinal/ruído (SNR) daquela medição. O estagiário responde que a SNR é uma relação entre as potências do sinal de baixa e de alta frequências que estão envolvidos no sinal medido.
Desse modo, para calcular a SNR da medição, o estagiário deve indicar a seguinte expressão matemática:
Dado
Vrms e VRrms são os valores RMS do sinal e do ruído
Considere o diagrama de blocos da figura a seguir.
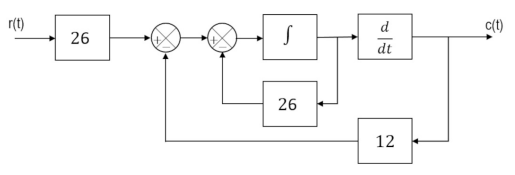
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
Assinale a alternativa que contém a função de transferência do sistema.

Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
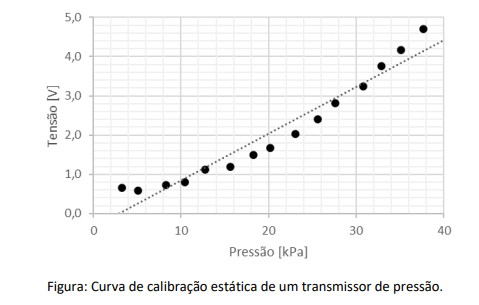
Com base na curva de calibração apresentada, é possível afirmar que:
Considere as seguintes afirmações sobre o problema de localização para robôs móveis.
I - Usar isoladamente as informações de encoders, medindo o giro das rodas, é suficiente para evitar erros de localização.
II - Um modelo de localização que leva em conta entradas de comando é melhor que um modelo que não incorpora tais dados.
III - O Filtro de Kalman é um algoritmo recursivo que pode ser usado para produzir uma estimativa da localização.
IV - O filtro de partículas é um método determinístico, que aponta uma localização única dentre um conjunto de possibilidades.
Está correto apenas o que se afirma em
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que