Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
• LIGA o aquecedor quando T ≤ 58 °C.
• DESLIGA o aquecedor quando T ≥ 62 °C.
Assuma que:
• O sensor é adequado e sem falhas.
• O sistema térmico é lento (há inércia térmica).
• Não há modulação de potência: apenas ligado ou desligado.
Assinale a alternativa que descreve corretamente o efeito principal da histerese nesse controle.
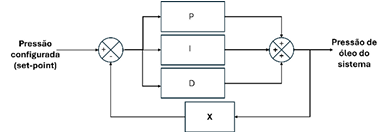
A partir do diagrama de blocos, de acordo com a teoria de controle PID, marque a opção que contém o componente correto a ser instalado no bloco indicado com a letra X.
Considere os circuitos 1 e 2 representados a seguir:
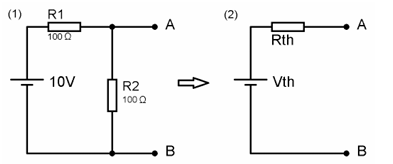
Calcule os parâmetros de equivalência de Thévenin do circuito 2, tensão e resistência de Thévenin (Vth e Rth), que uma carga perceberia se conectada entre os pontos A e B.
O controlador PID é um popular sistema utilizado na indústria para controlar grandezas como pressão, temperatura, vazão, entre outras.
Esse tipo de controle ocorre comumente em malha fechada, através de uma linha de realimentação (feedback) que tem a função de
A análise de circuitos elétricos e eletrônicos utiliza de diversas ferramentas para a solução de problemas. Dentre elas há um teorema que permite substituir um circuito linear de dois terminais por um circuito simplificado equivalente que se reduz a uma fonte de corrente e um resistor em paralelo.
O teorema descrito é conhecido por
Observe o circuito resistivo a seguir.
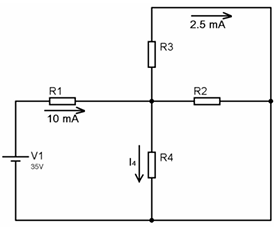
As correntes que atravessam os resistores R1 e R3 são conhecidas e estão indicadas no circuito.
Sabendo que R2 = 10R1 e R2 = R3, determine a corrente elétrica I4 que atravessa o resistor R4.
Sobre as ações do controlador PID, assinale a opção correta.
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
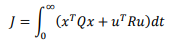
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
Seja uma rede de Petri com os seguintes elementos:
• Conjunto de lugares: P = {p1,p2,p3,p4}
• Conjunto de transições: T = {a,b,c,d}
• Pré condições das transições:
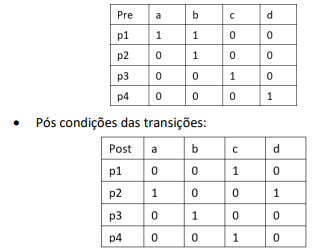
Considere que a rede está com uma marcação inicial p1 = 2, p2 = 0, p3 = 0 e p4 = 0, e disparam-se as transições a, b, c e d, em sequência e nesta ordem.
A marcação final da rede será
Considere o seguinte sistema SISO representado na forma de espaço de estados:
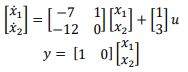
A representação deste mesmo sistema em função de transferência é