Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 279 questões
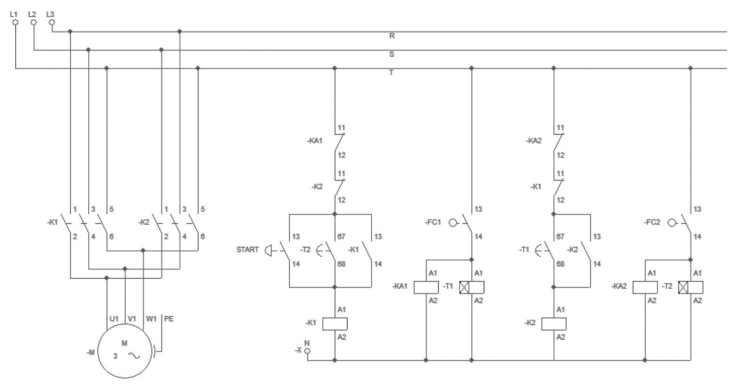
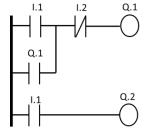
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Um sistema de movimentação foi projetado para utilizar um motor de passo NEMA 23 com resolução de 1,8° por passo. O projeto estabelece que um CLP deve enviar os pulsos de comando para o drive do motor de passo.
Sabendo que o CLP envia 400 pulsos de comando, desejando obter uma rotação completa no eixo do motor, assinale a alternativa que indica corretamente a configuração que o técnico de automação deve configurar no drive do motor de passo.
A figura a seguir é uma representação simplificada, onde os terminadores foram suprimidos, de uma rede de comunicação industrial formada por um controlador (CLP) conectado a vários dispositivos de campo (sensores).
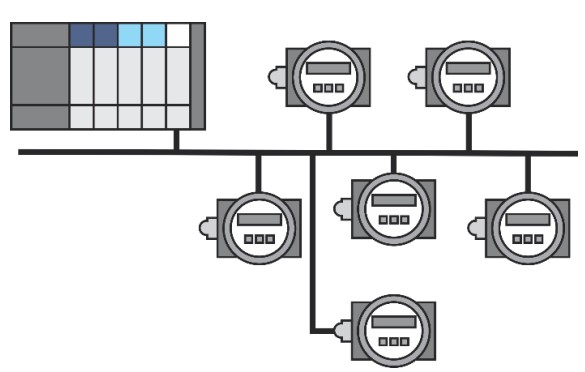
Assinale a alternativa que identifica corretamente o tipo de topologia física dessa rede de comunicação industrial.
O protocolo de comunicação de dados Modbus é largamente aplicado em redes industriais.
Assinale a alternativa correta sobre as características desse protocolo de dados.
O esquema elétrico a seguir exibe a ligação das botoeiras sem retenção S1, S2 e S3 e do relé K1 a um CLP. As entradas do CLP são consideradas em nível lógico alto (1) quando conectadas à tensão de 24 V e as saídas são a relé, com contato do tipo normalmente aberto. Além da ligação elétrica, é possível observar o diagrama Ladder, que determina o funcionamento do sistema.
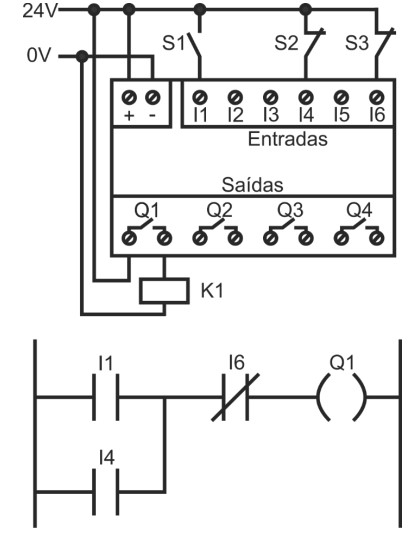
Com base nas informações fornecidas e nos diagramas apresentados, assinale a alternativa em que a combinação dos estados das botoeiras permite a energização do relé K1.
O diagrama Ladder, apresentado a seguir, é composto pelo contato S1, pelas saídas K1 e K2 e por um temporizador T1 com atraso no desligamento.
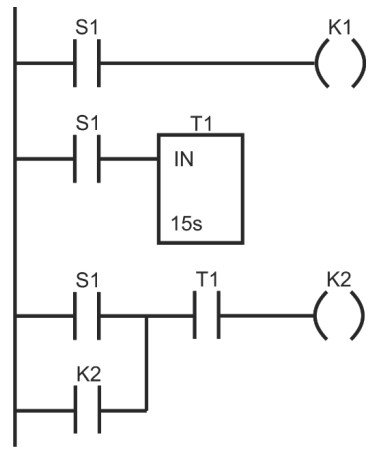
Assinale a alternativa correta sobre o funcionamento da programação apresentada.
A IEC 61131-3 especifica a sintaxe e a semântica das linguagens de programação para Controladores Lógicos Programáveis (CLP).
Assinale a alternativa que apresenta apenas linguagens definidas pela norma em questão.
Em uma estação de tratamento de água há uma grande quantidade de informações associada a sensores e atuadores. Esse volume de dados é um desafio para que operadores possam ter uma visualização completa do funcionamento da estação.
Nesse contexto, a principal função de um sistema supervisório é:
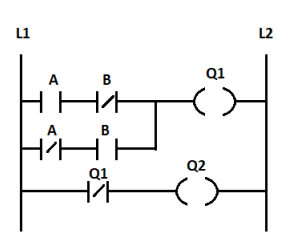
A saída Q2 do diagrama Ladder a seguir representa qual porta lógica?
Qual representação a seguir pertence a esse conjunto?