Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 279 questões
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081666
Engenharia de Automação
Considere o programa apresentado a seguir.
Sobre o seu funcionamento é correto afirmar que,
Sobre o seu funcionamento é correto afirmar que,
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081663
Engenharia de Automação
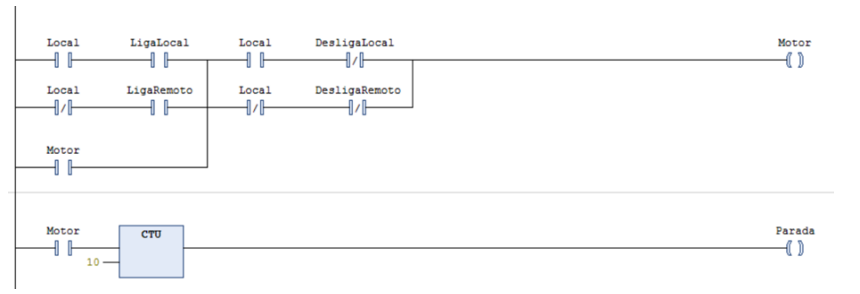
Considere a lógica de selo apresentada em linguagem Ladder a seguir para a implementação do acionamento de
um motor por meio de uma botoeira com comando de liga e desliga no campo.

Sobre essa lógica, é correto afirmar que
Sobre essa lógica, é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081661
Engenharia de Automação
Assinale a alternativa que descreve o funcionamento de um Controlador Lógico Programável (CLP), considerando-se o seu ciclo de varredura (scan).
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050424
Engenharia de Automação
Sobre a associação da lógica convencional à lógica Ladder,
relacione adequadamente as colunas a seguir.
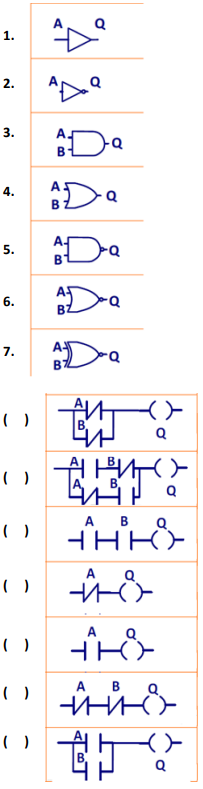
A sequência está correta em
A sequência está correta em
Ano: 2022
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2022 - IF-SP - Técnico de Laboratório - Área: Automação Industrial |
Q3977397
Engenharia de Automação
Em instrumentação são utilizados os transmissores que são instrumentos que convertem um
sinal qualquer, de um sensor ou transdutor, em um
sinal padrão para ser enviado a distância. Quando
este sinal padrão é elétrico, ele pode ser transmitido em tensão ou corrente, sendo os padrões de sinais elétricos mais utilizados: as redes analógicas
de tensão (padrão 0 a 10V e padrão -10V a +10V)
e as redes analógicas de corrente (padrão 0 a 20mA
e padrão 4 a 20mA).
Em relação à transmissão do valor de uma variável, através de sinais elétricos entre um transmissor e um controlador, seguindo esses padrões de redes analógicas, indique a afirmativa correta.
Em relação à transmissão do valor de uma variável, através de sinais elétricos entre um transmissor e um controlador, seguindo esses padrões de redes analógicas, indique a afirmativa correta.
Ano: 2022
Banca:
FEPESE
Órgão:
Prefeitura de Balneário Camboriú - SC
Prova:
FEPESE - 2022 - Prefeitura de Balneário Camboriú - SC - Professor de Inovação e Tecnologia - Edital nº 005 |
Q2401086
Engenharia de Automação
Qual o paradigma predominante no que diz respeito à prática de ensino utilizando a robótica?
Ano: 2022
Banca:
Quadrix
Órgão:
CRT-04
Prova:
Quadrix - 2022 - CRT-04 - Assistente de Tecnologia da Informação |
Q1952777
Engenharia de Automação
Julgue o item, referentes às novas tecnologias.
Para a robótica, define-se um robô como um sistema não autônomo que existe no mundo físico e que pode agir sobre o ambiente em que se encontra para alcançar objetivos predeterminados.
Para a robótica, define-se um robô como um sistema não autônomo que existe no mundo físico e que pode agir sobre o ambiente em que se encontra para alcançar objetivos predeterminados.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894295
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894294
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894293
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
Ano: 2019
Banca:
ADM&TEC
Órgão:
Prefeitura de Rio Largo - AL
Prova:
ADM&TEC - 2019 - Prefeitura de Rio Largo - AL - Eletricista |
Q1712202
Engenharia de Automação
Leia as afirmativas a seguir:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103244
Engenharia de Automação
Em ambientes industriais, a integração e comunicação
entre diversos dispositivos eletrônicos de fabricantes
distintos é um processo comum e necessário; para
garantir a segurança e confiabilidade na transmissão das
informações são utilizadas redes de automação.
Considerando a rede que utiliza o protocolo Fieldbus,
assinale a alternativa CORRETA.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103242
Engenharia de Automação
Desde seu surgimento, a linguagem de programação
Ladder se configurou com uma das linguagens de
programação para controladores lógicos programáveis
mais utilizadas na indústria.
Em relação a essa linguagem, assinale a alternativa
CORRETA.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103241
Engenharia de Automação
A criação de diversos modelos de equipamentos
dedicados à automação industrial gerou uma grande
variedade de equipamentos e, como consequência,
surgiram diversas linguagens para programação de
controladores lógicos programáveis, – CLPs.
São linguagens gráficas específicas para CLPs,
EXCETO:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103240
Engenharia de Automação
A Norma IEC 61131 define um padrão global para
programação de controle industrial.
Assinale a alternativa que apresenta linguagens definidas
por essa norma.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103233
Engenharia de Automação
O sistema de numeração hexadecimal utiliza a base 16,
logo possui 16 símbolos possíveis.
Assinale a alternativa que apresenta o resultado
da conversão hexadecimal-decimal para o número
hexadecimal 8AF2.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103231
Engenharia de Automação
O sistema decimal binário é o sistema de codificação
numérica mais importante em sistemas digitais.
Assinale a alternativa que apresenta o resultado da
conversão decimal-binário para o número decimal 25.
Ano: 2016
Banca:
INSTITUTO AOCP
Órgão:
EBSERH
Prova:
INSTITUTO AOCP - 2016 - EBSERH - Engenheiro Clínico (CH-UFPA) |
Q732736
Engenharia de Automação
O padrão RS-232 é amplamente utilizado para
comunicação entre o CLP e a PRINTER em
autoclaves e termodesinfectoras. Quando o
conector utilizado for o modelo DB-25, qual
pino usualmente corresponde ao GND?
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541219
Engenharia de Automação
Texto associado
Sobre os barramentos do tipo CAN, verifique se as alternativas abaixo são CERTAS (C) ou ERRADAS (E):
( ) Os dados enviados são codificados considerando diferença de potencial entre os sinais CAN_H e CAN_L (codificação diferencial).
( ) Utilizam os conceitos de “bit dominante” (bit lógico 1) e “bit recessivo” (bit lógico 0).
( ) A prioridade com que uma mensagem é transmitida, relativamente à outra mensagem, é especificada pelo identificador das mensagens. Mensagens com identificador de maior valor numérico tem maior prioridade.
( ) Os nós de transmissão possuem a capacidade de analisar a disponibilidade do barramento antes de transmitir.
A alternativa que contém a sequência de respostas corretas, na ordem de cima para baixo, é:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541218
Engenharia de Automação
Sobre os meios de transmissão guiados, assinale a alternativa INCORRETA: