Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 279 questões
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081697
Engenharia de Automação
Um algoritmo de planejamento de movimentos baseado em amostragem é dito ser probabilisticamente
completo se(,)
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081696
Engenharia de Automação
Há vários tipos de robôs aéreos. NÃO são capazes de
realizar voo pairado aqueles baseados em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081694
Engenharia de Automação
Em robótica, o problema de localização é fundamental
e consiste em determinar a posição e orientação de
um robô em relação a um referencial determinado.
Considere as seguintes afirmações sobre o problema de localização para robôs móveis.
I - Usar isoladamente as informações de encoders, medindo o giro das rodas, é suficiente para evitar erros de localização.
II - Um modelo de localização que leva em conta entradas de comando é melhor que um modelo que não incorpora tais dados.
III - O Filtro de Kalman é um algoritmo recursivo que pode ser usado para produzir uma estimativa da localização.
IV - O filtro de partículas é um método determinístico, que aponta uma localização única dentre um conjunto de possibilidades.
Está correto apenas o que se afirma em
Considere as seguintes afirmações sobre o problema de localização para robôs móveis.
I - Usar isoladamente as informações de encoders, medindo o giro das rodas, é suficiente para evitar erros de localização.
II - Um modelo de localização que leva em conta entradas de comando é melhor que um modelo que não incorpora tais dados.
III - O Filtro de Kalman é um algoritmo recursivo que pode ser usado para produzir uma estimativa da localização.
IV - O filtro de partículas é um método determinístico, que aponta uma localização única dentre um conjunto de possibilidades.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081693
Engenharia de Automação
Complete, corretamente, as lacunas do texto a seguir
sobre o problema de cinemática de manipuladores.
Considerando-se um robô industrial, o problema de cinemática direta está interessado em determinar ____________ de ____________, com base em ____________ de ____________.
A sequência que preenche as lacunas de forma correta é
Considerando-se um robô industrial, o problema de cinemática direta está interessado em determinar ____________ de ____________, com base em ____________ de ____________.
A sequência que preenche as lacunas de forma correta é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081692
Engenharia de Automação
Um codificador óptico, ou encoder, é um tipo de sensor usado para medição da posição de juntas de revolução. Considere que uma dada junta movimenta-se
com velocidade constante e foi usado um encoder do
tipo incremental para medir a variação da posição.
Durante a aquisição dos dados, a forma de onda que
melhor representa a saída deste encoder é dada por
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081689
Engenharia de Automação
Considere o seguinte algoritmo de planejamento de
caminhos:
1 - Siga em direção à posição alvo.
2 - Caso um obstáculo seja encontrado:
a. Contorne o obstáculo por completo;
b. Lembre o ponto mais próximo do alvo.
3 - Retorne usando a menor rota ao ponto mais próximo guardado e continue em direção ao alvo.
Em termos gerais, é correto afirmar que esse algoritmo representa
1 - Siga em direção à posição alvo.
2 - Caso um obstáculo seja encontrado:
a. Contorne o obstáculo por completo;
b. Lembre o ponto mais próximo do alvo.
3 - Retorne usando a menor rota ao ponto mais próximo guardado e continue em direção ao alvo.
Em termos gerais, é correto afirmar que esse algoritmo representa
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081686
Engenharia de Automação
Numere os eventos sequencialmente, do primeiro ao
último passo, usados no algoritmo de planejamento
2D utilizando grafo de visibilidade.
( ) Aplique o algoritmo A* .
( ) Determine o espaço de configurações livres.
( ) Trace linhas de visibilidade entre a configuração alvo e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre a configuração inicial e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre todos os obstáculos.
A sequência correta de eventos é
( ) Aplique o algoritmo A* .
( ) Determine o espaço de configurações livres.
( ) Trace linhas de visibilidade entre a configuração alvo e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre a configuração inicial e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre todos os obstáculos.
A sequência correta de eventos é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081685
Engenharia de Automação
Preencha corretamente as lacunas do texto a seguir
com relação às características dos sensores presentes
em robôs.
Em um manipulador industrial, o encoder óptico é um sensor usado para medir ___________, sendo qualificado como ___________. Já o laser é um sensor usado para medir ___________, sendo classificado como ___________.
Em um manipulador industrial, o encoder óptico é um sensor usado para medir ___________, sendo qualificado como ___________. Já o laser é um sensor usado para medir ___________, sendo classificado como ___________.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081684
Engenharia de Automação
Analise as asserções a seguir e a relação proposta entre elas.
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081682
Engenharia de Automação
O manipulador robótico observado na imagem a seguir representa uma variante do modelo SCARA.
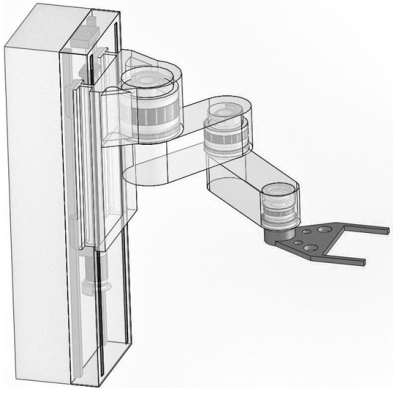
Sobre ele, é correto afirmar que possui
Sobre ele, é correto afirmar que possui
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081681
Engenharia de Automação
Considere o robô mostrado na figura a seguir, tentando alcançar um alvo atrás do obstáculo. Ele foi programado com o comportamento descrito na sequência de 1 até 6. Sensores de contato indicam a colisão
com os obstáculos.
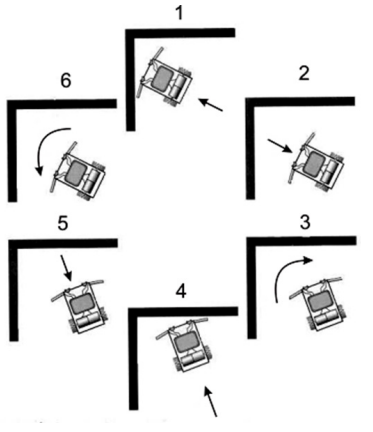
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081679
Engenharia de Automação
Com relação à estratégia de controle via torque computado NÃO é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081678
Engenharia de Automação
Uma característica importante dos robôs industriais
é sua versatilidade, a qual permite que sejam programados para executar atividades distintas.
Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081677
Engenharia de Automação
Informe se é verdadeiro (V) ou falso (F) o que se afirma sobre algoritmos de planejamento de caminho.
( ) Os algoritmos baseados em campos potenciais são suscetíveis a problemas de não convergência, devido a mínimos locais.
( ) O algoritmo Mapa de Rotas Probabilístico é considerado como capaz de resolver várias instâncias do problema de planejamento, em um mesmo ambiente.
( ) O método de planejamento baseado no Diagrama de Voronoi tem a propriedade de minimizar a distância do robô aos obstáculos.
( ) O método de planejamento baseado no Grafo de Visibilidade tem a propriedade de maximizar a distância do robô aos obstáculos.
A sequência correta é
( ) Os algoritmos baseados em campos potenciais são suscetíveis a problemas de não convergência, devido a mínimos locais.
( ) O algoritmo Mapa de Rotas Probabilístico é considerado como capaz de resolver várias instâncias do problema de planejamento, em um mesmo ambiente.
( ) O método de planejamento baseado no Diagrama de Voronoi tem a propriedade de minimizar a distância do robô aos obstáculos.
( ) O método de planejamento baseado no Grafo de Visibilidade tem a propriedade de maximizar a distância do robô aos obstáculos.
A sequência correta é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081676
Engenharia de Automação
Analise as asserções a seguir e a relação proposta entre elas.
I - Na robótica móvel, em se tratando de algoritmos de planejamento de caminhos, são desejáveis como características: possibilidade de cálculo em tempo de execução; tratamento de obstáculos complexos; facilidade de implementação; lidar com incertezas
PORQUE
II - tais robôs podem ser usados em ambientes bem estruturados, esparsos, com iluminação uniforme e com poucas fontes de distúrbios.
A respeito das asserções, é correto afirmar que
I - Na robótica móvel, em se tratando de algoritmos de planejamento de caminhos, são desejáveis como características: possibilidade de cálculo em tempo de execução; tratamento de obstáculos complexos; facilidade de implementação; lidar com incertezas
PORQUE
II - tais robôs podem ser usados em ambientes bem estruturados, esparsos, com iluminação uniforme e com poucas fontes de distúrbios.
A respeito das asserções, é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081675
Engenharia de Automação
Considere o programa em Ladder apresentado a seguir.
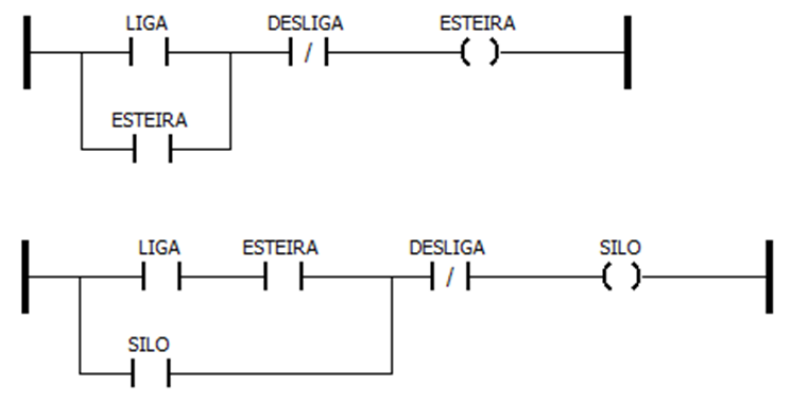
É correto afirmar que assim que o
É correto afirmar que assim que o
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081673
Engenharia de Automação
Considerando-se o programa em Ladder apresentado a seguir, assinale o programa em Texto Estruturado cujo
comportamento mais se aproxima do comportamento do programa em Ladder.

Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081669
Engenharia de Automação
A pirâmide da automação industrial, mostrada a seguir, é uma representação muito utilizada para indicar a estruturação usualmente empregada nos projetos de automação industrial.
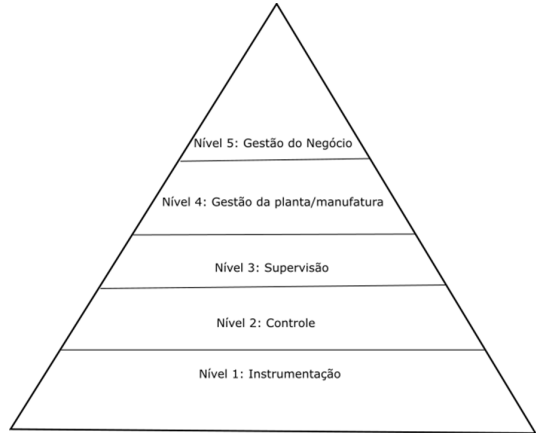
Considerando-se que o nível 1 é o que contém os instrumentos de campo (como sensores e atuadores), e o nível 2 é o que contém os dispositivos de controle (como CLPs e SDCDs), assinale a alternativa que apresenta redes tipicamente utilizadas comunicando estes níveis.
Considerando-se que o nível 1 é o que contém os instrumentos de campo (como sensores e atuadores), e o nível 2 é o que contém os dispositivos de controle (como CLPs e SDCDs), assinale a alternativa que apresenta redes tipicamente utilizadas comunicando estes níveis.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081668
Engenharia de Automação
De modo a simplificar a manutenção da comunicação entre os diversos níveis de dados em automação industrial,
em 1996 foi proposto o padrão OPC (antigamente conhecido como OLE for Process Control, mas hoje em dia
conhecido como Open Platform Communications).
Esse padrão, atualmente conhecido como OPC Clássico, foi largamente empregado na indústria, principalmente na comunicação entre CLPs e SCADAs. Sobre ele é correto afirmar que se trata de um
Esse padrão, atualmente conhecido como OPC Clássico, foi largamente empregado na indústria, principalmente na comunicação entre CLPs e SCADAs. Sobre ele é correto afirmar que se trata de um
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081667
Engenharia de Automação
Os sistemas supervisórios são sistemas digitais para a monitoração e a operação da planta, gerenciando diversas
variáveis do processo (sejam elas digitais ou analógicas). Normalmente são divididos em dois grandes grupos: as
IHMs (Interfaces Homem-Máquina) e o SCADA (Sistema de Controle Supervisório e Aquisição de Dados, do inglês
Supervisory Control And Data Acquisition). Em relação a esses dois grupos, considere as seguintes afirmações.
I - As IHMs normalmente se encontram no chão-de-fábrica, próximas aos equipamentos que estão sendo controlados/monitorados. São muito comuns no contexto de máquinas de comando numérico (CNC).
II - Os sistemas SCADA normalmente são implementados em computadores pessoais comuns. Sua comunicação pode ser feita diretamente com os CLPs e remotas em campo, ou pode-se ter uma estação responsável por centralizar os dados de comunicação da rede de controle e instrumentação e fornecê-los, via rede de comunicação, para as demais estações.
III - É comum que os sistemas SCADA tenham controle de acesso de usuários e exibam/permitam diferentes dados e comandos para diferentes níveis de usuários.
IV - Os sistemas supervisórios não são capazes de indicar alarmes e eventuais condições fora do padrão normal de operação.
É correto afirmar que
I - As IHMs normalmente se encontram no chão-de-fábrica, próximas aos equipamentos que estão sendo controlados/monitorados. São muito comuns no contexto de máquinas de comando numérico (CNC).
II - Os sistemas SCADA normalmente são implementados em computadores pessoais comuns. Sua comunicação pode ser feita diretamente com os CLPs e remotas em campo, ou pode-se ter uma estação responsável por centralizar os dados de comunicação da rede de controle e instrumentação e fornecê-los, via rede de comunicação, para as demais estações.
III - É comum que os sistemas SCADA tenham controle de acesso de usuários e exibam/permitam diferentes dados e comandos para diferentes níveis de usuários.
IV - Os sistemas supervisórios não são capazes de indicar alarmes e eventuais condições fora do padrão normal de operação.
É correto afirmar que