Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 279 questões
O trecho de programa seguinte implementa uma lógica de controle para a partida direta (simples) de um motor, implementada em linguagem Ladder.
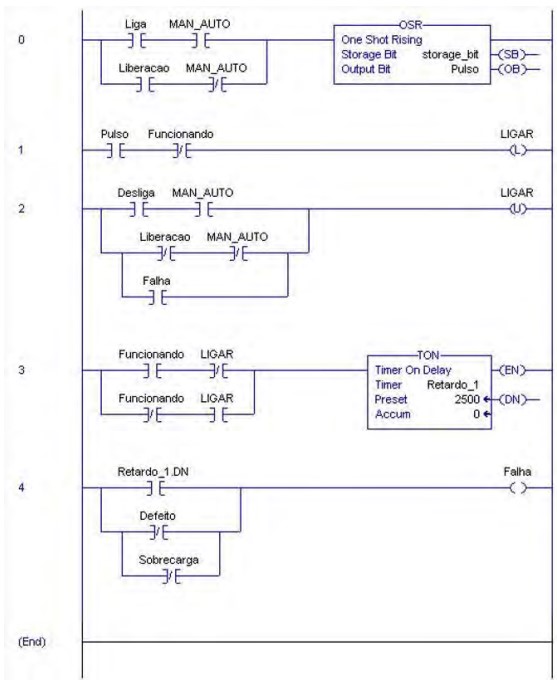
Neste programa o bloco OSR (One Shot Rising, na linha 0), implementa a detecção a bordas de subida. Ele faz com que sua saída OB (Output Bit, associada a variável Pulso) seja setada toda vez que sua entrada sofrer uma transição lógica ascendente. Nas demais condições, o bit de saída permanece em nível lógico baixo. Analise as afirmativas seguintes, referentes a este programa de partida direta de um motor:
I. Uma vez acionada a saída Ligar, o motor será desligado se, dentro de 2,5s não houver o retorno de que ele foi realmente ligado.
II. Se, após a saída Ligar ser acionada o sinal Funcionando sofrer uma transição lógica ascendente, o motor é desligado.
III. A realimentação do sinal Ligar em forma de contato de selo não é necessária uma vez que bobinas tipo Set (Latch - retentiva) e Reset (Unlatch – não retentiva) são usadas nas linhas 1 e 2 do programa para programar o ligamento/desligamento do motor.
IV. É possível usar a entrada Liberação para que, em modo automático, lógicas externas comandem o motor em função de, por exemplo, sequenciamento de equipamentos do processo.
Selecione a única opção que relaciona todas as afirmativas corretas.
Analise as afirmativas seguintes, referentes a características de Controladores Lógicos Programáveis – CLP’s:
I. Para garantir o atendimento às exigências de um sistema de tempo real o programa de controle deve monitorar regularmente os sinais de entrada provenientes do processo. Isto é garantido pela execução cíclica do programa em CLP’s num período denominado varredura (SCAN).
II. Depois do advento dos CLP’s os relés e os contatores tornaram-se dispensáveis à automação industrial, minimizando problemas de manutenção com desgastes mecânicos das partes móveis, ruídos e dissipação térmica associados a estes dispositivos.
III. Um passo na linguagem SFC representa um estado particular do sistema, recebe um nome único, só pode aparecer uma vez na rede SFC e pode possuir somente uma ação de controle associada a ele para descrever seu comportamento.
IV. Tanto funções como blocos funcionais são referidos como blocos, mas apenas os blocos funcionais possuem persistência de dados por meio da estrutura de dados criada quando instância é declarada.
Selecione a única opção que relaciona todas as afirmativas corretas.
Com relação aos Sistemas SCADA (Supervisory Control and Data Acquisition) ou Sistemas Supervisórios, como são comumente referidos no Brasil, analise as afirmativas seguintes:
I. Disponibilizam recursos como telas de sinópticos, gráficos de tendência (dinâmica e histórica), configuração e emissão de relatórios e gerenciamento de alarmes, além de gráficos de controle estatístico de processos.
II. Permitem aos operadores executarem funções de operação do processo, como liga/desliga e seleção de modo de operação e funções de supervisão do processo, como visualização de estados e variáveis, por meio de interfaces humano-máquina (IHM).
III. Podem ser denominados IHM, simplesmente, pois são interfaces amigáveis de alto nível para a visualização de dados de um processo em tempo real.
IV. Possuem uma ferramenta de desenvolvimento (development time), uma ferramenta de execução/visualização (runtime), uma base de dados (dicionário de tags ou etiquetas), drivers e protocolos de comunicação.
Selecione a única opção que relaciona todas as afirmativas corretas.
O ruído eletromagnético presente em ambientes industriais é um desafio importante para a transmissão de sinais digitais no chão de fábrica. Abaixo estão listadas algumas tecnologias implementadas em redes industriais.
I. A rede DEVICENET utiliza terminadores nas extremidades.
II. A rede PROFINET utiliza meios ópticos de transmissão.
III. A rede CAN utiliza codificação diferencial.
Qual(is) tecnologia(s) reduz(em) a suscetibilidade da rede a interferências eletromagnéticas externas?
Analise o circuito pneumático apresentado na figura abaixo.
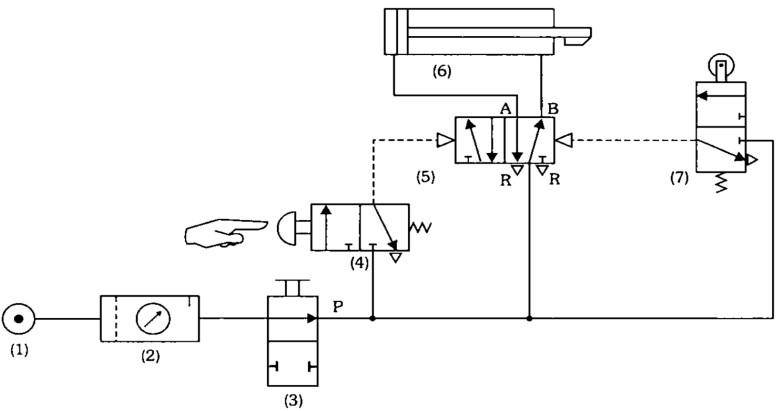
FIALHO, Arivelto Bustamante. Automação pneumática: projetos, dimensionamento e análise de circuitos. 7. ed. São Paulo: Érica, 2011.
Sobre o circuito acima, é possível afirmar que:
Uma fábrica de pães de forma deseja automatizar sua linha de produção. Para isso, foi estruturado o seguinte procedimento: ao se pressionar um botão de início B1, um motor M1 é ativado, o qual liga uma esteira responsável pelo transporte dos pães. O sensor S1 detecta os pães que se dirigem a uma caixa posicionada na esteira M2 . A cada 10 pães, a esteira M1 deve parar e ativar a esteira M2 por um período de 1 segundo. A esteira M2 controla o transporte das caixas completas. Após o período de 1 segundo, o contador é zerado e o ciclo reinicia. Assinale a opção correta que contém o código em Ladder para o procedimento descrito.
São características das interfaces de entrada e saída dos Controladores Lógicos Programáveis, exceto:
A norma IEC61131, especificamente em sua seção 3, estabelece e normatiza as linguagens de programação empregadas em Controladores Lógicos Programáveis (CLPs). Levando em conta as aplicações e orientações para cada uma das linguagens especificadas na norma, é correto afirmar que:
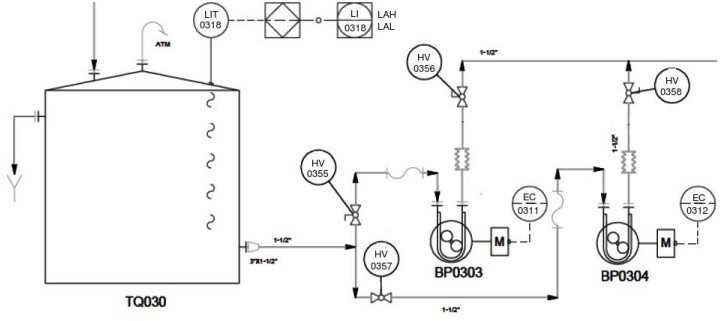
Sobre o trecho de fluxograma de processo a seguir, marque a afirmação errada:
Qual dos sensores é mais adequado para medir a posição angular de uma junta rotativa em um sistema de controle de posicionamento de um robô industrial?
Um robô industrial é uma máquina programável de propósito geral que possui certas características antropomórficas, sendo o braço mecânico (ou manipulador) a característica antropomórfica mais óbvia. O manipulador, combinado com um controlador de alto nível, permite que um robô industrial realize várias tarefas como carregamento e descarregamento de máquinas e equipamentos, processo de soldagem e pintura pulverizada.
Em relação aos robôs industriais, pode-se afirmar
que:
Considere um robô planar com duas juntas rotativas (RR), em que o comprimento do primeiro link é L1 e o comprimento do segundo link é L2. A cinemática direta relaciona os ângulos das juntas (θ1 e θ2) com a posição do efetuador final no plano XY. Qual é a equação da cinemática direta que descreve a posição (x, y) do efetuador final em termos dos ângulos das juntas e dos comprimentos dos links?
I. Suporta a topologia de ligação em estrela. II. Suporta a topologia de ligação em barramento. III. Suporta a topologia de ligação ponto a ponto. IV. Pode ser utilizado com o modelo de comunicação mestre-escravo. V. Pode ser utilizado com o modelo de comunicação de passagem de token (token passing).
Quais estão corretas?