Considere o robô mostrado na figura a seguir, tentando alcan...
Próximas questões
Com base no mesmo assunto
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081681
Engenharia de Automação
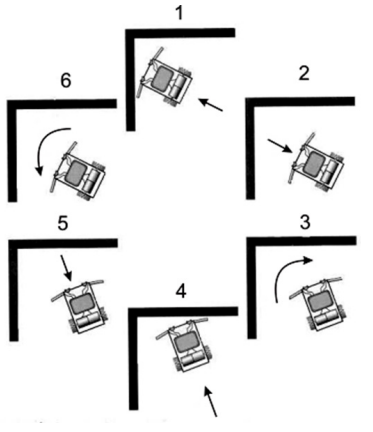
Considere o robô mostrado na figura a seguir, tentando alcançar um alvo atrás do obstáculo. Ele foi programado com o comportamento descrito na sequência de 1 até 6. Sensores de contato indicam a colisão
com os obstáculos.
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô