Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
A imagem a seguir ilustra uma malha de controle de pressão:
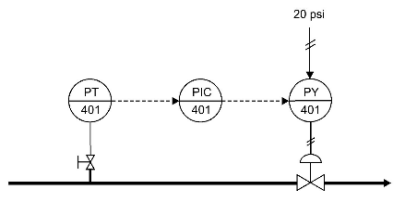
Considerando o exposto, assinale a afirmativa INCORRETA.
O valor do zero do compensador é de, aproximadamente:
Considere o sensor de abalo estrutural sobre uma carcaça X, medido por Y, dado pela imagem.
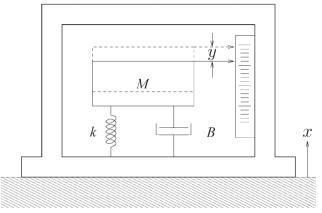
A função de transferência que exprime a relação Y(s) por X(s) é dada por:
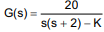 .
Para que esse sistema seja estável, o valor de K deverá ser:
.
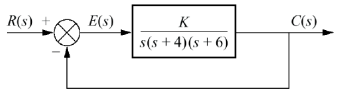
Para que esse sistema seja estável, o valor de K deverá ser: Observe a figura a seguir:
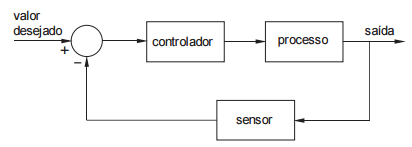
Para o sistema representado na figura, a função de transferência de malha fechada C(s)/R(s) é
Considere as afirmações a seguir, sobre um sistema de controle de processo por malha fechada:
I – O sinal de saída referente a um dado processo é mensurado e comparado com o sinal de entrada, possibilitando, assim, um ajuste do controle, tornando o processo mais estável.
II – O controle de processo por malha fechada não depende do sinal de saída do processo.
III – O sinal de entrada é comparado com um valor de referência, aumentando, assim, a estabilidade do sistema.
Está correto o que se afirma em
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Nesse sistema,
Os sistemas digitais de controle distribuídos (SDCD) NÃO
Uma malha de controle de um processo é constituída de diversos elementos, os quais podem ser classificados segundo sua função na malha.
Assim, o
Analise as afirmativas a seguir acerca desses sistemas:
I - A ? gura 1 representa um sistema de 1a ordem onde o valor da resposta y(t) alcança 63,2% de seu valor final quando o tempo decorrido é igual à constante de tempo, e, após decorrido um tempo igual a quatro vezes a constante de tempo, a resposta, praticamente, alcança seu valor em estado-estacionário.
II - Nos sistemas de 1a ordem (figura 1) , para efetuar a mesma variação na saída do sistema, a mudança na entrada deve ser pequena se KP for grande (sistemas muito sensíveis) ou deve ser grande se KP for pequeno, e a figura 2 representa o mesmo sistema, porém com a existência de um tempo morto.
III - Na figura 3, a representação do sistema de 2a ordem reflete um sistema sobreamortecido onde quanto maior o fator de amortecimento mais o sistema demora a responder, sendo o valor do fator de amortecimento da curva 1 > curva 2 > curva 3.
Está correto o que se afirma em

A respeito das representações das características da resposta transitória observada no gráfico, é INCORRETO que o tempo
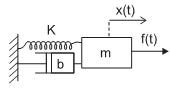
Utilizando as grandezas que aparecem na figura, e considerando que o termo forçante f(t) é a entrada, e a posição da massa x(t) é a saída, a função de transferência do sistema mecânico G(s)=x(s)/F(s) é igual a
I - A linguagem verbal no desenvolvimento de projetos automatizados é muito indicada, pois pode gerar várias interpretações, enriquecendo a comunicação.
II - As representações gráficas não são as mais indicadas devido ao elevado grau de dificuldade em sua compreensão.
III - Uma das maiores dificuldades do desenvolvimento de Sistemas Automatizados é o fornecimento de informações de modo claro e conciso aos projetistas.
Está correto o que se afirma em