Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Considere o sistema dinâmico abaixo:
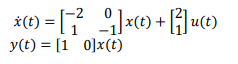
Podemos afirmar que o sistema:
Dada a função de transferência
G (s) = 1/ s2+s-12 , podemos afirmar que os polos são:
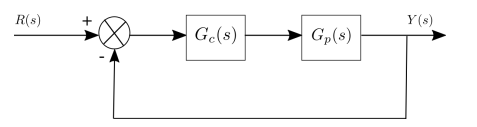
Considere a função de rede abaixo:
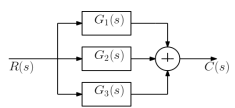
É correto afirmar que C(s) pode ser descrita pela expressão:
Observe a figura a seguir.
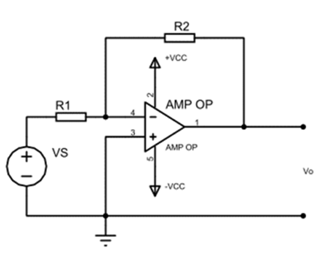
A função de transferência que melhor define o circuito mostrado na figura é:
 pode-se afirmar que a compensação é do tipo:
pode-se afirmar que a compensação é do tipo:
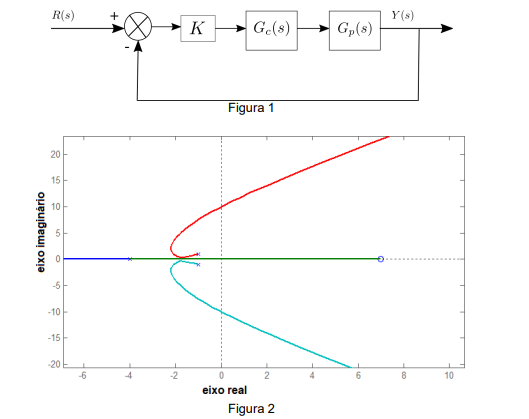
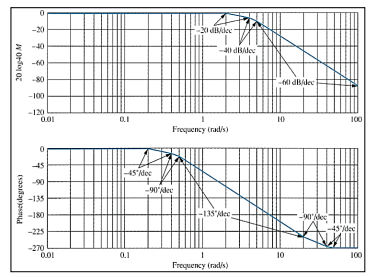
Assinale a opção em que o gráfico do LGR está associado com o sistema de malha aberta KGc(????)Gp(s)
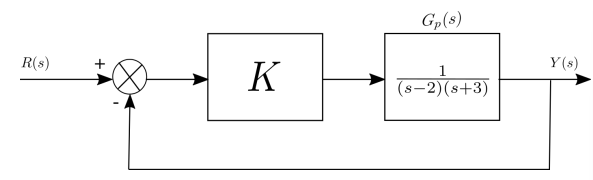
Um sistema de controle em malha fechada é implementado, conforme o diagrama de blocos da figura abaixo
A lei de controle do controlador PID apresentada na equação acima, representa a realização do controlador PID na estrutura
Considerando Gc(s) um controlador Proporcional, Integral, Derivativo (PID), com ganho proporcional, Kc tempo integral, T, e tempo derivativo, T, conforme equação abaixo.

Um engenheiro, com o intuito de implementar um sistema de controle discreto, identificou, por meio de algoritmo recursivo, o modelo matemático de uma planta industrial, caracterizado pela seguinte equação a diferenças:

Tendo como base a equação a diferenças, analise as afirmativas abaixo.
I. A função de transferência no domínio discreto é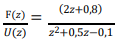
II. Este modelo possui um zero em -0,25.
III. O modelo discreto é de 2ª ordem, com atraso de transporte igual a ???? = 2.
IV. O ganho estático (DC – Direct Current ) desse processo é igual a 2.
Estão corretas as afirmativas:
Considere o sistema abaixo, representado em espaço de estados.
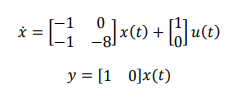
Um engenheiro, verificando (por meio da análise de controlabilidade) que o sistema é totalmente controlável, projetou um controlador por realimentação de estados, alocando os autovalores do sistema (polos de malha fechada) em -3 e -4. Sendo assim, qual o vetor de ganho k = [k1 k2] alcançado pelo engenheiro projetista?
Considere um processo industrial, caracterizado pela função de transferência abaixo.
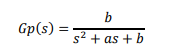
Em relação ao desempenho deste processo, pode-se afirmar que Gp(s):
I. Quanto mais à esquerda estiver localizado o polo, mais lenta será a componente da resposta no tempo. II. Os zeros de uma função de transferência diminuem o efeito dos polos que estão próximos a ele. III. Zeros filtram variações bruscas do sinal de entrada e polos amplificam.
Está correto somente o que se apresenta em
A faixa para a estabilidade é de, aproximadamente:
Analise a imagem e considere: Gc1 e Gc2 controladores PID e autovalores reais e distinto.
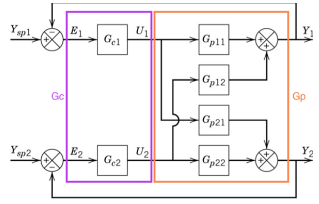
Para facilitar o ajuste dos controladores PID é necessário projetar uma realimentação de estados por alocação de polos, de forma que o sistema dinâmico equivalente no espaço de estados esteja na forma canônica:
Relacione adequadamente as colunas a seguir.
1. Método de relé em malha fechada.
2. Método do modelo interno.
3. Método do ganho e período críticos.
4. Preditor de Smith.
5. Comportamento servo.
6. Comportamento regulatório.
( ) Comportamento realizado pelo controlador do processo mediante distúrbios.
( ) Método utilizado para obter no limite da estabilidade os valores do ganho e período críticos, mas que é inviável em muitos casos na prática.
( ) Comportamento realizado para o controlador para “rastrear o setpoint”.
( ) Método utilizado para obter o ganho e o período crítico sem levar o sistema dinâmico ao limite da estabilidade.
( ) Método utilizado para se obter o controlador dado um desempenho requerido e um modelo da planta a se controlar.
( ) Minimiza os efeitos do tempo morto da planta no controle de malha.
A sequência correta está em
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
I. Tem quatro terminais, sendo: catodo, anodo, gate 1 e gate 2.
II. É usado em sistemas de corrente alternada e, em função da polarização do terminal gate, ele pode conduzir corrente de anodo para catodo ou de catodo para anodo.
III. É usado em sistemas de corrente alternada e, em função do instante do disparo pelo terminal gate, ele opera como um retificador controlado.
Está correto o que se afirma APENAS em