Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Considere um sistema de controle com realimentação unitária, cuja função de transferência de malha aberta possui um polo na origem.
Quanto ao erro de regime permanente ao seguir sinais do tipo degrau e rampa, esse sistema apresentará
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta M(s), dada por

Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em

em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:

Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
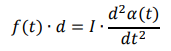
em que: f(t) = força de controle (entrada do modelo)
d = distância entre o ponto de aplicação da força de controle e o centro de massa
I = momento de inércia
a(t) = ângulo de orientação do satélite (saída do modelo)
Foram atribuídos os seguintes valores para os parâmetros do sistema: d = 1,2 m e I = 4.000 kgm².
A equipe analisou o comportamento do satélite sujeito a diferentes sinais de entrada.
Assinale a opção que contém a resposta temporal do modelo a dois pulsos sequenciais, com as seguintes características: um pulso de 20 N, em t = 10s, com uma pequena duração de apenas 0,1s e um outro pulso em t = 20s, com mesma duração e intensidade, mas com magnitude negativa. Os pulsos podem ser considerados como excitações impulsivas.

em que:
u = sinal temporal da entrada do sistema;
y = sinal temporal da saída do sistema;
b = coeficiente de atrito viscoso do amortecedor; e
k = constante da mola.
Considere que o comando step (num, den) fornece o gráfico da resposta temporal ao degrau unitário de um sistema linear, cujos coeficientes dos polinômios do numerador e do denominador da sua função de transferência são, respectivamente, os vetores num e den.
O engenheiro implementou o seguinte pseudocódigo para analisar o sistema de suspensão do veículo:
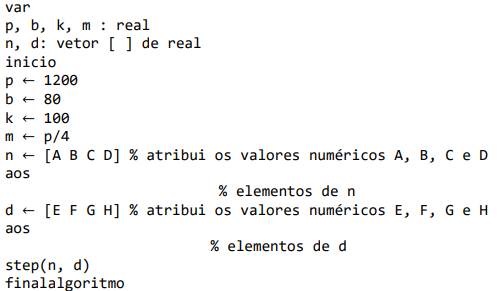
Assinale a opção que contém os valores numéricos dos vetores n e d, necessários à obtenção da resposta do sistema a uma entrada do tipo rampa unitária, utilizando o algoritmo acima.
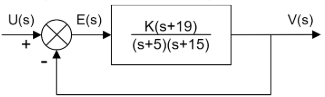
( ) Para K = 75, este sistema apresenta um erro de regime permanente de 5% em relação a entrada em degrau.
( ) Para K = 300 o erro de seguimento a uma entrada em rampa é de 2%.
( ) A constante de erro de velocidade é infinita, KV = ∞.
( ) Para esse sistema não há valor positivo de K que resulte em instabilidade.
As afirmativas são, respectivamente,
A medição de nível de líquidos e sólidos armazenados tem papel fundamental na indústria atual, com base nisso relacione as tecnologias de medição de nível com suas principais características.
1. Tipo Ultrassônico
2. Tipo Deslocador
3. Tipo Capacitivo
4. Tipo Radar
( ) Usado para fluídos limpos e não recomendado para líquidos viscosos, com sólidos em suspensão ou pastas. Não sofre influência de espumas ou vapores.
( ) Usa sinais de corrente de radiofrequência e depende das características elétricas do material sob medição e da geometria do tanque.
( ) Medição é afetada pela presença de bolhas ou espuma na superfície. Acúmulo de condensação e poeira no transdutor reduz a precisão. Não funciona em ambientes com vácuo ou alta pressão.
( ) Sem partes móveis e opera sem contato com o objeto a ser medido. Alcance limitado na medição de líquidos não condutivos.
Assinale a opção que indica a relação correta na ordem apresentada.
Utilize a figura a seguir para responder à questão.

A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.
Utilize a figura a seguir para responder à questão.
A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Julgue o item a seguir, em relação a projeto de tubulação industrial e controle de processo.
Os sistemas digitais de controle distribuído coordenam
várias unidades de controle distribuídas em uma rede, em
vez de centralizar todas as operações em um único ponto.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Um filtro digital é caracterizado pela seguinte equação de diferenças:

em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
O referido filtro é um sistema causal e estável.