Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Considere o seguinte esquema elétrico de
um CLP, elaborado para implementar uma lógica
de selo no seu contato de saída Q2 para ligar/desligar uma lâmpada L1 por meio do acionamento das
chaves S1 e S2:
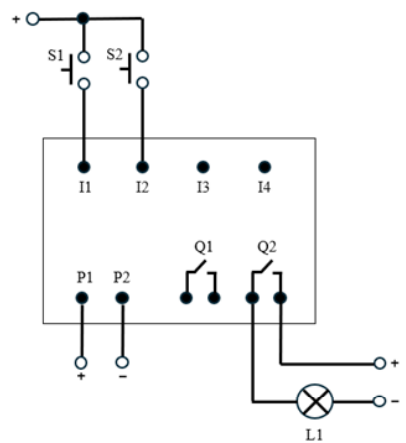
Fonte: IFSP, 2024
Qual alternativa a seguir ilustra um programa, em Linguagem de Programação Ladder, para implementar a lógica acima descrita?
Um determinado processo industrial pode
ser modelado através de um sistema linear em
diagrama em blocos representado na figura. Em
uma situação na qual o ganho do controlador seja
ajustado em K = 1, indique a alternativa que apresenta corretamente os polos de malha fechada e a
classificação do sistema quanto a sua estabilidade,
respectivamente.
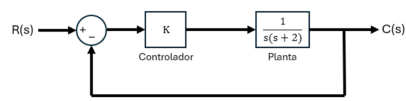
Fonte: IFSP, 2024.
Um dos critérios no estudo da qualidade de sistemas de controle em malha fechada é
o Erro de regime permanente, determinado por
Ereg = 
Deste modo, determine-o para o sistema de primeira ordem representado no diagrama de blocos a seguir considerando uma entrada de degrau unitário.
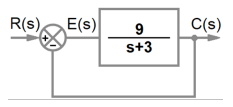
Fonte: IFSP, 2024
A modelagem matemática representa uma etapa importante em projetos de engenharia de controle
em que, após a aplicação das leis fundamentais, simplificações e aproximações, é possível determinar
uma equação matemática capaz de representar de
forma próxima o comportamento dinâmico de um
determinado sistema, seja ele térmico, mecânico,
elétrico ou hidráulico. Deste modo, dado o circuito
eletrônico a seguir, obtenha a função de transferência que represente seu comportamento dinâmico,
considerando o amplificador operacional ideal.
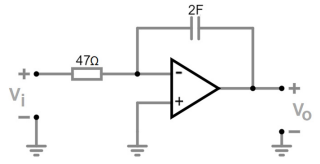
Fonte: IFSP, 2024
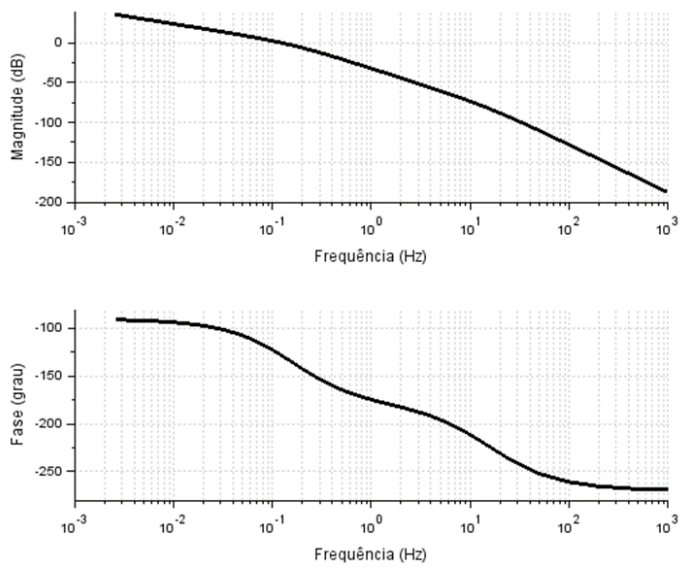
No estudo de sistemas de controle, nem sempre temos acesso fácil à função de transferência para
estudar a sua estabilidade. Uma técnica que pode ser utilizada neste caso é o levantamento experimental do
seu diagrama de bode.
Fonte: IFSP, 2024
Considerando o diagrama de bode apresentado, determine a margem de ganho, margem de fase e a estabilidade deste sistema linear.
-Rede de comunicação industrial baseada em EtherCAT, para controle em tempo real.
-Implementação de um Digital Twin, para simulação e otimização em tempo real.
-Algoritmos de machine learning, para detecção precoce de falhas e manutenção preditiva.
-Interface homem-máquina (IHM) baseada em realidade aumentada.
-Integração com sistemas MES (Manufacturing Execution System) e ERP (Enterprise Resource Planning).
Durante a operação, o sistema deve lidar com perturbações estocásticas na composição da matéria-prima e variações na demanda de produção, mantendo a qualidade do produto final dentro de especificações rigorosas. Considerando esse cenário, é correto o que se afirma em:
A figura a seguir representa um sistema de malha fechada constituído por um bloco com função de transferência G(s) no caminho direto e outro bloco com função de transferência H(s) na malha de realimentação. O sinal de entrada é denotado por X(s), e o de saída, por Y(s).
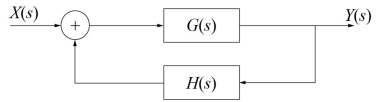
Na situação hipotética apresentada, a função de transferência de malha fechada, entre o sinal de saída e o sinal de entrada, é determinada por
Julgue o próximo item, relativo à teoria de controle.
O critério de Nyquist pode ser utilizado diretamente tanto
para sistemas contínuos quanto para sistemas discretos sem
qualquer modificação.
Julgue o próximo item, relativo à teoria de controle.
Controles PID são inadequados para uso em sistemas não lineares, devido à sua estrutura linear.
Julgue o próximo item, relativo à teoria de controle.
Embora os diagramas de Bode forneçam apenas a resposta
em frequência e de fase de um sistema, ainda é possível
extrair desse diagrama informações úteis relativas à resposta
transitória do sistema.
Existem diversas técnicas para sintonia dos parâmetros desse tipo de controlador, a qual deve ser escolhida de acordo com as características do sistema como um todo.
Uma destas técnicas é o método
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta N(s), dada por
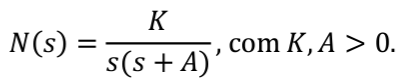
Inicialmente, o valor do ganho do controlador K foi ajustado de forma a tornar o sistema em malha fechada criticamente amortecido.
Caso o ganho K seja ligeiramente aumentado, é esperado que o sistema tenha
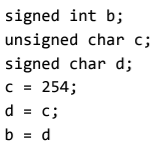
Após a execução desse trecho de código, o valor de b é
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador.
Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada.
Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário.
Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário