Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
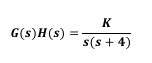
Deseja-se analisar o erro em regime permanente para uma entrada do tipo degrau unitário r (t) = u(t). Diante desse contexto, assinale a alternativa correta.

Essa transformação
Considerando conceitos de análise de resposta transitória e controle PID, é correto afirmar que
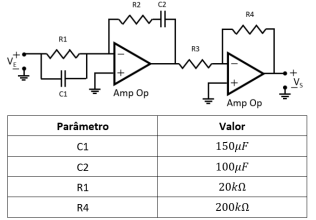
Os valores de R2 e R3 para que a função de transferência desejada seja
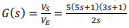 são, respectivamente,
são, respectivamente,Um sistema de controle digital utiliza um microcontrolador para amostrar a resposta de um sensor de temperatura e atuar sobre uma válvula proporcional. O modelo contínuo simplificado do processo é:
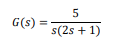
O sistema é amostrado a uma frequência de 10 Hz e implementado em um microcontrolador ARM com conversores A/D e D/A de 12 bits. Deseja-se converter este sistema para o domínio discreto utilizando o método da transformação por retenção de ordem zero (ZOH).
O modelo discreto G(z) equivalente aproximado, utilizando o
método da substituição  onde o período de amostragem T = 0,1s é
onde o período de amostragem T = 0,1s é
Um sistema de controle digital utiliza um microcontrolador para amostrar a resposta de um sensor de temperatura e atuar sobre uma válvula proporcional. O modelo contínuo simplificado do processo é:
O sistema é amostrado a uma frequência de 10 Hz e implementado em um microcontrolador ARM com conversores A/D e D/A de 12 bits. Deseja-se converter este sistema para o domínio discreto utilizando o método da transformação por retenção de ordem zero (ZOH).
Um sistema físico massa–mola–amortecedor é descrito pela equação diferencial:

onde x(t) é o deslocamento da massa e F(t) é a força aplicada pelo atuador.
Deseja-se controlar a posição da massa por meio de um controlador PID, que recebe como entrada o erro entre a referência r(t) e a posição medida x(t). O sinal de controle gerado pelo PID é u(t), o qual atua sobre um driver de motor que converte o sinal elétrico de controle em força mecânica segundo: F(t) = Ka u(t), onde Ka é a constante de ganho do atuador.
Com base na modelagem matemática e nos princípios de malhas de controle, é correto afirmar que
Durante a fase de projeto, o engenheiro modela o sistema pela seguinte função de transferência linearizada:

onde K representa o ganho do processo e t é a constante de tempo térmica do sistema.
Com base nesses conceitos, analise as afirmativas a seguir:
I. A constante de tempo t indica a rapidez da resposta do sistema a uma perturbação, sendo tanto menor quanto mais rápido o processo atingir o regime permanente.
II. O ganho K representa a sensibilidade do processo, isto é, a razão entre a variação da variável de saída e a variação da variável manipulada em regime permanente.
III. O controlador ajusta a válvula com base na comparação entre o valor medido e o valor de referência em um sistema de malha aberta.
É correto o que se afirma em
Entre estes sistemas, está o sistema de casamento automático do gerador de RF à bobina de plasma.
O sistema de controle RF por potência refletida utiliza o Módulo 1 para amostrar, em tempo real, uma fração da potência do sinal direto (, medida pelo Sensor 2) e uma fração da potência do sinal refletido (, Sensor 1) na linha entre o gerador e a rede de casamento. Então, calcula-se o coeficiente de reflexão e VSWR e um algoritmo aciona os atuadores do circuito de casamento (capacitores a vácuo/indutor variável) para minimizar e manter a carga efetiva próxima de 50 . Assim, maximiza-se a transferência de potência e estabiliza-se o plasma.
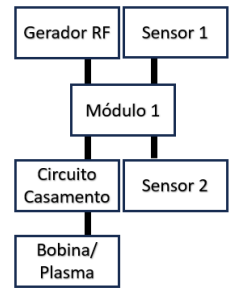
O módulo 1 é um
Assinale a opção que apresenta a escolha adequada de componentes, nesse contexto.
Assinale a opção que apresenta a escolha adequada de componentes, nesse contexto.
O detector mais indicado para esta aplicação é


Utilize as informações a seguir para responder às próximas 3 (três) questões.
Em um multiplicador de dínodos discretos (Secondary Electron Multiplier), o íon se choca em um dínodo de conversão e libera elétrons secundários que são amplificados em vários estágios de dínodos até gerar um pulso detectável na saída do detector.
Este tipo de detector é utilizado em ICP-MS com analisador de massas por quadrupolo e realizam medidas chamadas de contagem de pulsos.
Durante a realização destas medidas, após o detector registrar um
pulso durante a detecção de um evento, ocorre um curto intervalo
de recuperação conhecido por tempo morto (dead time,  ), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
Considere o modelo não-paralisável para descrever a taxa de
eventos observados R (contagens por segundo - cps) em função da
taxa real de eventos r (cps) e o dead time (s):

Com o objetivo de melhorar a relação sinal ruído (S/N) e preservar a linearidade nas medidas deve-se
Utilize as informações a seguir para responder às próximas 3 (três) questões.
Em um multiplicador de dínodos discretos (Secondary Electron Multiplier), o íon se choca em um dínodo de conversão e libera elétrons secundários que são amplificados em vários estágios de dínodos até gerar um pulso detectável na saída do detector.
Este tipo de detector é utilizado em ICP-MS com analisador de massas por quadrupolo e realizam medidas chamadas de contagem de pulsos.
Durante a realização destas medidas, após o detector registrar um
pulso durante a detecção de um evento, ocorre um curto intervalo
de recuperação conhecido por tempo morto (dead time, ), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
Considere o modelo não-paralisável para descrever a taxa de
eventos observados R (contagens por segundo - cps) em função da
taxa real de eventos r (cps) e o dead time (s):
Os parâmetros controlados são:
Use as informações a seguir para resolver a próxima questão.
As principais áreas de um sistema de ICP-MS que necessitam de inspeção e manutenção periódica são: sistema de introdução de amostra; tocha de plasma; região de interface; ótica iônica; bombas primárias ou de pré-vácuo; e filtros de água e ar.
I. Realizar periodicamente nebulização de óleo para checar eventuais obstruções que alteram o padrão do spray.
II. As obstruções podem ser removidas utilizando-se contrapressão com argônio.
III. As obstruções podem ser removidas inserindo-se um fio na ponta do nebulizador, evitando assim a contaminação.
É correto o que se afirma em: