Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões

Após análise do sistema, os zeros da função de transferência desse sistema de controle valem
Coluna 1
1. Tensão de linha.
2. Sequência de fase.
3. Gerador CA conectado em ∆.
4. Gerador trifásico conectado em Y.
5. Tensão de fase.
Coluna 2
( ) Tensão entre uma linha e um neutro de um gerador conectado em Y ou tensão entre duas linhas de um gerador em ∆.
( ) Os três condutores usados para conectar os terminais à carga do circuito são chamados de linhas.
( ) Ordem na qual as tensões senoidais produzidas por um gerador polifásico afetam a carga na qual estão conectadas.
( ) As tensões de fase e de linha são equivalentes e têm o mesmo valor que as tensões induzidas nos enrolamentos.
( ) Diferença de potencial que existe entre as linhas de um sistema monofásico ou polifásico.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Condutores de menor diâmetro podem ser usados para transmitir a mesma potência à mesma tensão, o que reduz a quantidade de cobre necessário (normalmente, cerca de 25% a menos) e, consequentemente, os custos de fabricação e manutenção das linhas.
( ) Linhas mais robustas são mais fáceis de instalar e suas torres de sustentação podem ser mais delgadas e mais espaçadas.
( ) Equipamentos e motores trifásicos apresentam melhores características de partida e operação que os sistemas monofásicos, pois a transferência de potência da fonte para a carga nos sistemas monofásicos está menos sujeita à flutuação do que nos sistemas trifásicos.
( ) Em geral, a grande maioria dos motores de grande porte é trifásica porque a partida não precisa de um projeto especial ou de circuitos externos adicionais.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ao ser aplicado um Impulso Unitário na entrada desse sistema, o sinal de saída oscilará na forma de uma senoide exponencialmente amortecida.
Dessa forma, pelo exposto acima, a constante conhecida como Razão de Amortecimento desse sistema vale
Um circuito elétrico é composto por uma fonte de tensão vF(t) que alimenta três componentes considerados ideais: um resistor de resistência R, um capacitor de capacitância C e um indutor de indutância L, todos associados em série. Fechando o circuito da fonte sobre esses três componentes ligados em série, uma corrente i(t) vai circular. A dinâmica desse sistema é regida por uma equação diferencial, obtida pela lei de Kirchoff, que relaciona a soma das tensões nesta malha: vF(t) = vR(t) + vC(t) + vL (t).
As relações entre as tensões e a corrente da malha são:

Com base nos dados, considerando-se todas as condições iniciais nulas, qual é a expressão da Função de Transferência,
no domínio de Laplace, que liga a corrente elétrica de saída com a tensão da fonte de alimentação, ou seja, a expressão
de 
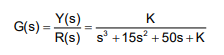
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?
Com base nas transformadas de Laplace, julgue o próximo item.
Considere-se o problema de valor inicial a seguir, em que x(t) é uma entrada do sistema.
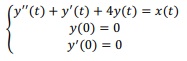
Nesse problema, a função de transferência é igual a  em que X(s) e Y(s) denotam, respectivamente, as
transformadas de Laplace de x(t) e y(t).
em que X(s) e Y(s) denotam, respectivamente, as
transformadas de Laplace de x(t) e y(t).
Com base nas transformadas de Laplace, julgue o próximo item.
Se F(s) = L(f(t)) é a transformada de Laplace de uma função derivável f(t) que satisfaz  , então a transformada de
Laplace de
, então a transformada de
Laplace de  é igual a 2 ∙ F(s) − 2.
é igual a 2 ∙ F(s) − 2.
Com base nas transformadas de Laplace, julgue o próximo item.
Um sistema de controle que tem função de transferência igual a  tem resposta f(t) estável.
tem resposta f(t) estável.
Um método gráfico de representação no plano complexo para a determinação da localização de todos os polos de malha fechada a partir do conhecimento da localização dos polos e zeros de malha aberta, quando um parâmetro (geralmente o ganho) varia de zero a infinito, é conhecido como:
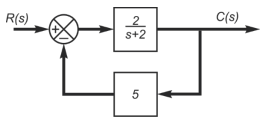
Assinale a alternativa que indica corretamente a função de transferência C(s)/R(s) do sistema.
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
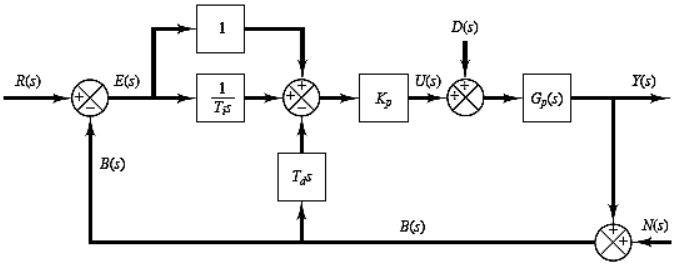
Considere o diagrama de blocos da Figura 7 abaixo:
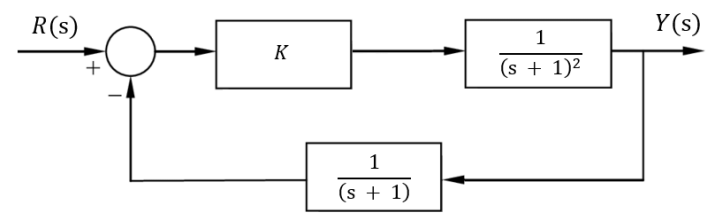
Figura 7
Assinale a alternativa que corresponde ao intervalo de valores de K que garante a estabilidade do
sistema em malha fechada.
Figura 6
Considere o sistema de controle com retroalimentação unitária mostrado na Figura 5 abaixo:
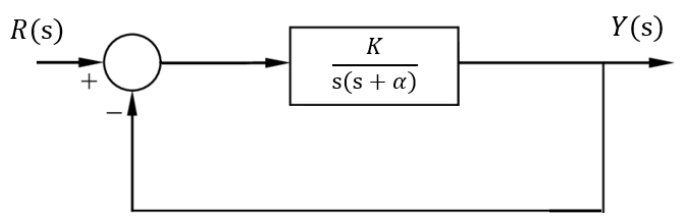
Figura 5
Determine os valores de K e α para os quais a resposta a um degrau unitário é subamortecida
(ζ = 0,5) e apresenta um tempo de 2 segundos para que as oscilações transitórias permaneçam
dentro de uma faixa de 2% em torno do valor final do regime permanente.
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo: