Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
 Os valores das três primeiras amostras da sequência x(n) , ou
seja,
Os valores das três primeiras amostras da sequência x(n) , ou
seja,  , respectivamente, são:
, respectivamente, são:  é a derivada do vetor de estados, y(t) é a saída e
u(t) é a entrada.
é a derivada do vetor de estados, y(t) é a saída e
u(t) é a entrada. 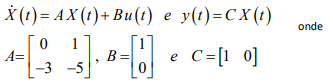
Utilizando-se uma realimentação de Estados com a lei de controle dada por:
 , em que K é o vetor de
ganhos e r(t) é uma entrada de referência, pretende-se alocar
seus dois polos de malha fechada nas posições reais
, em que K é o vetor de
ganhos e r(t) é uma entrada de referência, pretende-se alocar
seus dois polos de malha fechada nas posições reais  Para obter esse resultado, o valor do vetor de ganhos K é:
Para obter esse resultado, o valor do vetor de ganhos K é: 
O gráfico da figura a seguir mostra o traçado do Lugar das Raízes para esta planta sujeita a uma realimentação de saída com lei de controle:
 e o ganho K varia de zero a infinito.
e o ganho K varia de zero a infinito. 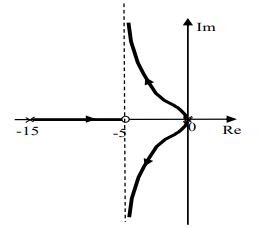
Um sistema contínuo, linear e modelado em espaço de estado, tem a sua dinâmica determinada pela seguinte equação matricial:

Onde u(t) é o sinal de entrada, X(t) é a derivada do vetor de estados e y(t) o sinal de saída. A planta dispõe de uma variável incerta, o parâmetro real k , em sua dinâmica. O valor de k que torna o sistema NÃO CONTROLÁVEL é
A função de transferência Y(s)/X(s) do sistema é igual a
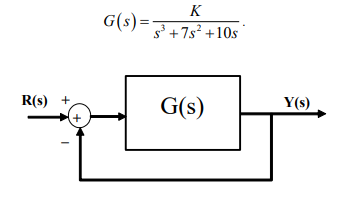
Para esta configuração em Malha Fechada, sabe-se que quando o valor do ganho K varia positivamente de 0 a infinito, o sistema em Malha Fechada entra em INSTABIIDADE a partir de um certo ganho. O valor do ganho no limiar da INSTABILIDADE é
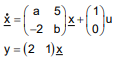
Supondo-se que a < b e que a equação característica do modelo desejado seja λ2 + 4λ + 13 = 0, qual deverá ser o valor escolhido para o parâmetro a?
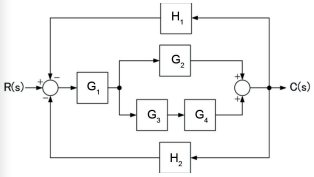
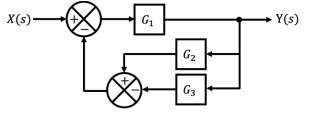
Um engenheiro, estudando uma planta industrial, descobre que ela é formada por diversos sistemas dinâmicos, interligados de acordo com a Figura acima.
Considerando-se que G1, G2, G3, G4, H1 e H2 são as funções de transferência desses sistemas, qual deverá ser a função de transferência C(s)/R(s) dessa planta?
G(s) = Y(s)/E(s) = 42/s2+8s+12
Aplicando-se um degrau de tensão, de amplitude 5 volts, na entrada desse sistema, a amplitude do sinal de tensão, em volts, na saída desse sistema, quando atingir o seu regime permanente, vai tender para
O gráfico mostrado na Figura a seguir apresenta a resposta ao degrau de um sistema de 2ª ordem. Esse sistema é representado pela seguinte Função de Transferência entre entrada e saída, onde o parâmetro B é desconhecido:

Com base nos dados da Figura, os valores do parâmetro
B e os da Razão de Amortecimento do sistema são, respectivamente,
O diagrama em blocos da Figura mostra um sistema linear, cujos blocos estão representados por Funções de Transferência em Laplace, configurando uma estrutura de Controle e Servomecanismos. A estrutura encontra-se em malha fechada, utilizando uma realimentação negativa de saída.

Para que o sistema, em malha fechada, tenha uma razão
de amortecimento de 0,5, o valor do ganho K será
Um determinado sistema dinâmico monovariável apresenta o seguinte modelo, sob a forma de espaço de estado:

em que u representa o sinal de entrada, y, o sinal de saída, e x, o vetor de estados.
Qual deverá ser o modelo desse sistema, sob a forma de
função de transferência G(s) = Y(s)/U(s)?

Um engenheiro deseja modificar o comportamento dinâmico de um sistema modelado por meio de função de transferência. Para isso, realiza uma realimentação negativa da saída, a partir do ajuste do ganho K > 0, conforme apresentado na Figura acima.
Analisando-se o diagrama do Lugar das Raízes (root locus), verifica-se que o sistema em malha fechada será

Na Figura acima encontra-se ilustrado um sistema discreto, modelado por meio da função de transferência de 3ª ordem apresentada.
No que se refere à posição dos polos e à estabilidade,
esse sistema é
Em sistemas de controle lineares e contínuos no tempo, o controlador PID produz o sinal de controle u(t), a partir do sinal de erro e(t), através da seguinte equação:

Uma forma prática de se construir um controlador eletrônico do tipo PID é mostrada no diagrama de circuito abaixo.

Considerando-se os amplificadores operacionais ideais, o
ganho integral Ki
desse controlador PID, expresso em s-1
,
é igual a
O técnico fechou a malha, aplicando uma realimentação negativa do sinal de saída. Ele foi variando o ganho do sinal realimentado até que os dois polos do sistema em Malha Fechada se deslocaram e chegaram a valores reais e iguais.
Com esse procedimento, o técnico conseguiu fazer com que a Razão de Amortecimento do sistema em Malha Fechada ficasse igual a
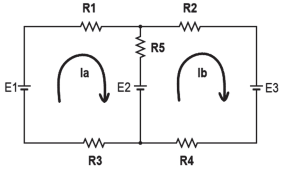
Se o resistor R5 vale 2 Ω , a potência, em watts, dissipada no resistor R5 será, aproximadamente,
Apesar de exigir uma manutenção maior, a parte A do sistema deve utilizar um motor de corrente contínua.