Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões

O baixo custo é uma das vantagens do controlador 1, que pode ser amplamente utilizado tanto em sistemas de controle industriais quanto domésticos.
A ação de controle do controlador 2 é denominada controle de taxa, visto que é proporcional à taxa de variação do sinal de erro atuante.
O controlador automático determina o desvio entre a saída do processo e o valor de referência, produzindo um sinal de controle que reduz o desvio a zero ou a um pequeno valor.
O controlador 1 pode conter um intervalo diferencial antes da comutação dos valores, podendo ser intencional para reduzir o desgaste do mecanismo de comutação.
A transformada z da saída da resposta de C(z) do sistema de controle digital, devido a uma entrada ao degrau, é dada por:

Encontre a resposta no domínio do tempo no período de amostragem. Considere a condição inicial zero. A alternativa correta
é:
Para a questão, considere a função de transferência X(S) / U(S):

Para a questão, considere a função de transferência X(S) / U(S):
Encontre a representação por espaço de estados do sistema, usando as seguintes variáveis de estado: x1 = x e x2 = 
A alternativa correta é:
Considere o seguinte gerador de corrente contínua:
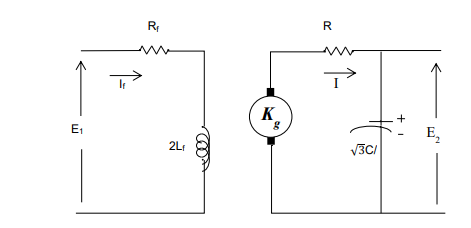
figura
A função de transferência E2(s) / E1(S) é:

 .
. A alternativa correta é:
K/s(s+8)(s+10).
Considere que o ganho K é positivo e que pode variar de 0 a infinito.
Com base nos dados fornecidos para o sistema em malha fechada da Figura acima, o valor do ganho K, que condiciona o sistema no limiar da instabilidade, é
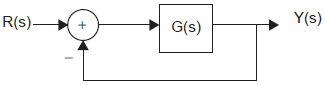
A partir da análise dessas curvas de resposta, é possível afirmar sobre o valor de ζn que:
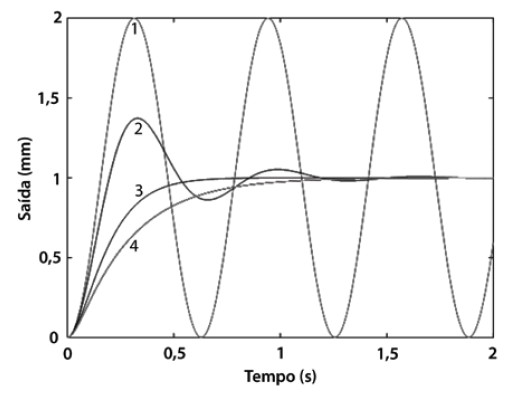
Nos gráficos abaixo, é mostrada a resposta c(t) de um sistema dinâmico, quando submetido a uma entrada degrau r(t).
A função de transferência que melhor representa esse sistema é:
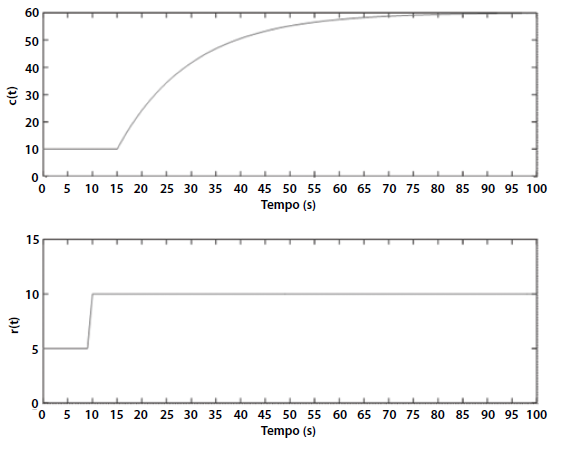
Considere o sistema abaixo:
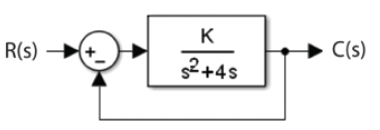
O valor de K que faz com que o sistema seja criticamente amortecido é:
Um sistema de controle, representado pela sua função de transferência H(s), possui a seguinte função de resposta em frequência:
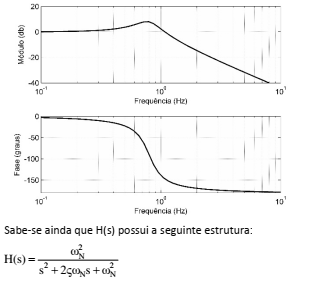
Quanto à sua resposta ao degrau, o sistema de controle é
classificado como
Julgue o próximo item, considerando a teoria de controle.
É correto considerar o controlador proporcional como um
amplificador com ganho ajustável.
Julgue o próximo item, considerando a teoria de controle.
O controle derivativo produz uma ação de correção
significativa por antecipação do erro atuante no sistema.

A saída y(t) é igual a: