Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 204 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262979
Engenharia de Automação
O projeto de automação de uma empresa especificou elementos de controle com mais de uma entrada, produzindo componentes de erro em estado estacionário em situações como a do sistema a seguir.
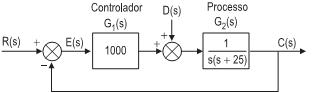
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262949
Engenharia de Automação
A análise de sistemas de controle de automação envolve conhecimentos sobre o funcionamento de seus componentes eletrônicos. A esse respeito são feitas as afirmativas:
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262944
Engenharia de Automação
Um sistema dinâmico, utilizado para controle de uma rede automatizada, forneceu dados processados ao longo do tempo e que permitiram a construção do quadro abaixo.
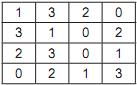
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192353
Engenharia de Automação
A equação recursiva a seguir gera a sequência causal y(n).
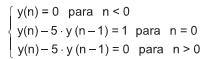
A expressão de y(n) para n ≥ 0 é
A expressão de y(n) para n ≥ 0 é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192352
Engenharia de Automação
O modelo em função de transferência de um sistema linear contínuo é dado por
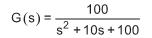
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por , onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo. Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192351
Engenharia de Automação
Um sistema discreto tem como entrada r(n) e saída y(n), que se relacionam pelas equações de diferenças
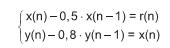
A função de Transferência do sistema
A função de Transferência do sistema
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192350
Engenharia de Automação
O polinômio do denominador da função de transferência de um sistema em malha fechada é dado por
s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é
s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192348
Engenharia de Automação
Texto associado
Considere o enunciado para responder a questão a seguir.

O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
 e K é uma constante positiva.
e K é uma constante positiva.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
e K é uma constante positiva.
A Função de Transferência que relaciona Y(s) com R(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192347
Engenharia de Automação
Costuma-se aproximar a variável complexa z, usada em sistemas discretos (digitais), pela variável também complexa w para sistemas contínuos, através da relação de transformação  onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192346
Engenharia de Automação
A famosa sequência de Fibonacci pode ser definida como o sinal x(n), discreto, causal e infinito, cujas primeiras amostras são

A sua lei de formação para pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
A sua lei de formação para
pode ser expressa como Aplicando a Transformada Z no sinal x(n), resulta a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192340
Engenharia de Automação
Um sinal v(t) é expresso, no domínio de Laplace, por
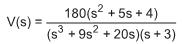
No domínio do tempo, quando t tende para infinito, o sinal v(t) tende para um valor estacionário, constante e igual a
No domínio do tempo, quando t tende para infinito, o sinal v(t) tende para um valor estacionário, constante e igual a
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192313
Engenharia de Automação

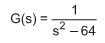
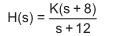
Considere o sistema de controle configurado na figura acima, onde a planta G(s) é INSTÁVEL, e deseja-se estabilizá-la e controlá-la com ajuda de um compensador do tipo H(s). Usa-se a técnica de cancelamento de polos da planta para reduzir a ordem do sistema. O engenheiro projetista achou, em seu cálculo, o ganho K = 125. Assim, os polos do sistema em malha fechada estarão posicionados em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192308
Engenharia de Automação
Um ruído de alta frequência, em sistemas de monitoramento ou controle, que corrompe um sinal, pode ser atenuado por um filtro
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192307
Engenharia de Automação
A função de transferência no domínio de Laplace de um sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
O valor inicial, em t = 0, do sinal de saída desse sistema, quando se aplica um impulso unitário na entrada, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192304
Engenharia de Automação
A função de transferência no domínio de Laplace de um
sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
O valor da resposta em regime permanente desse sistema,
para uma entrada tipo degrau unitário, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192303
Engenharia de Automação
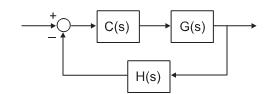
A Função de Transferência de Malha Aberta (FTMA) da estrutura de controle mostrada na figura acima é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192301
Engenharia de Automação
Em um sistema de controle em malha fechada, a planta é o elemento que possui a(s) variável(eis)
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Técnico de Operação Júnior |
Q182312
Engenharia de Automação
Com relação aos sistemas de controle de processo por malha fechada, considere as afirmativas a seguir.
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267626
Engenharia de Automação
Um sistema linear cuja função de transferência seja dada por 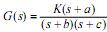 , em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267624
Engenharia de Automação
Em sistemas dinâmicos lineares e contínuos, a resposta ao impulso, também denominada função de ponderação, corresponde a uma forma de representação do sistema no domínio do tempo. Conhecendo-se a resposta impulsiva, a resposta do sistema a outros tipos de excitação pode ser corretamente obtida