Foram encontradas 75 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!

 Fonte: FUNCERN, 2025.
Fonte: FUNCERN, 2025.
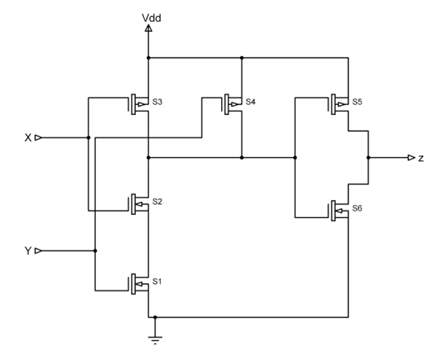
Considerando que a tensão de alimentação Vdd é suficiente para alimentar todo o circuito e que as entradas X e Y são alimentadas com tensões acima da tensão limiar, a porta lógica representada na figura
Fonte: FUNCERN, 2025.
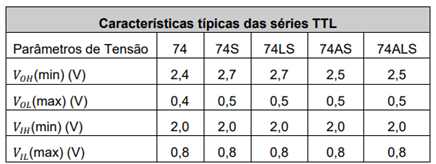
Quando um componente 74ALS está acionando uma entrada de um 74S, as margens de ruído são
 Fonte: Funcern 2025.
Fonte: Funcern 2025.
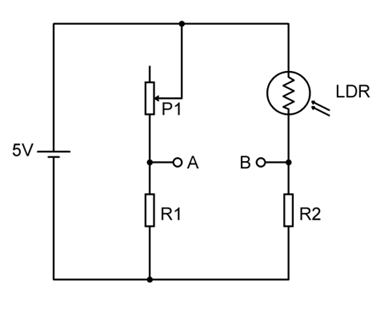
Sendo assim, se, para uma determinada iluminação, a resistência do LDR é igual a 6 kΩ e R1 = R2 = 10 kΩ, a tensão VAB é
 pode-se afirmar que a compensação é do tipo:
pode-se afirmar que a compensação é do tipo:
 é a constante de tempo do sistema ( > 0 ) e ???????? caracteriza o atraso
de transporte.
é a constante de tempo do sistema ( > 0 ) e ???????? caracteriza o atraso
de transporte. 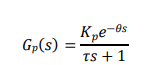
Um dos engenheiros, responsável pelos processos de chão de fábrica, deseja implementar uma malha de controle para essa planta, conforme diagrama de blocos da figura abaixo, sendo Gc(s), o controlador projetado, N é uma constante que representa o sensor de nível e R(s) o nível de referência que se deseja manter no sistema controlado.
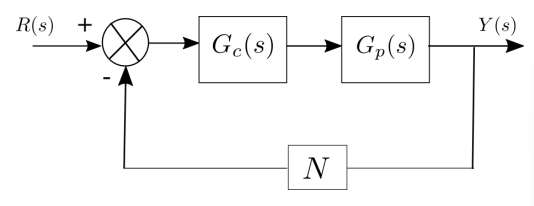
I. Na função de transferência Gp(s), se θ >>
significa que o sistema é lag dominante. II. Se Gc(s) é um controlador Proporcional, Integral (PI), e R(s) é uma referência que
varia na forma de um degrau, então em regime permanente, o nível do tanque seguirá
o nível desejado da referência, com erro nulo em estado estacionário.
III. Se Gc(s) é um controlador Proporcional, com ganho estático positivo, então o nível
do tanque, não acompanhará a referência (forma degrau) em regime permanente.
IV. Se Gc(s) é um controlador Proporcional, Integral (PI), e o atraso de transporte θ for
muito pequeno, podendo ser desconsiderado, então, a função de transferência em
malha fechada terá um zero e dois polos. 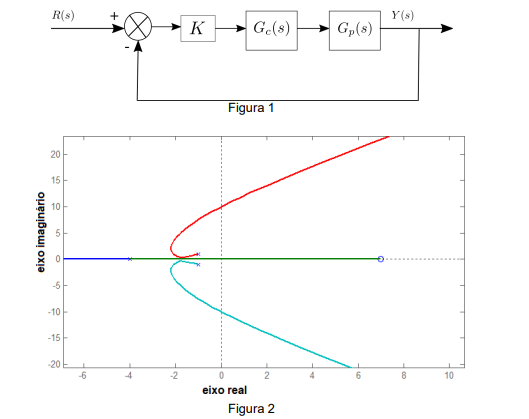
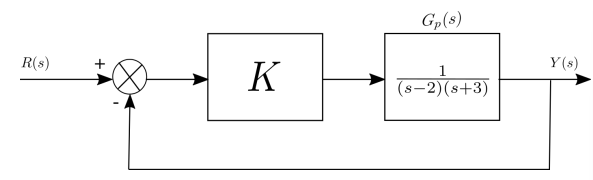
Assinale a opção em que o gráfico do LGR está associado com o sistema de malha aberta KGc(????)Gp(s)
Um sistema de controle em malha fechada é implementado, conforme o diagrama de blocos da figura abaixo
A lei de controle do controlador PID apresentada na equação acima, representa a realização do controlador PID na estrutura
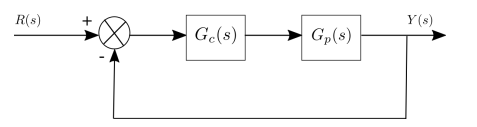
Considerando Gc(s) um controlador Proporcional, Integral, Derivativo (PID), com ganho proporcional, Kc tempo integral, T, e tempo derivativo, T, conforme equação abaixo.

Um engenheiro, com o intuito de implementar um sistema de controle discreto, identificou, por meio de algoritmo recursivo, o modelo matemático de uma planta industrial, caracterizado pela seguinte equação a diferenças:

Tendo como base a equação a diferenças, analise as afirmativas abaixo.
I. A função de transferência no domínio discreto é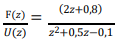
II. Este modelo possui um zero em -0,25.
III. O modelo discreto é de 2ª ordem, com atraso de transporte igual a ???? = 2.
IV. O ganho estático (DC – Direct Current ) desse processo é igual a 2.
Estão corretas as afirmativas:
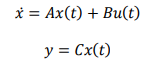
Considere o sistema abaixo, representado em espaço de estados.
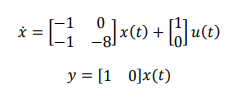
Um engenheiro, verificando (por meio da análise de controlabilidade) que o sistema é totalmente controlável, projetou um controlador por realimentação de estados, alocando os autovalores do sistema (polos de malha fechada) em -3 e -4. Sendo assim, qual o vetor de ganho k = [k1 k2] alcançado pelo engenheiro projetista?
Considere o circuito RLC da figura abaixo.
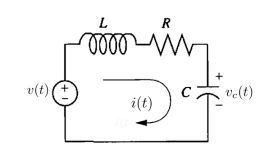
Considerando os sinais v(t) e vc(t) como sendo os sinais de entrada e saída do sistema, respectivamente, e definindo-se as variáveis de estados como x1 = i(t) e x2 = vc(t), temse as matrizes do modelo matemático representado em Espaço de Estados
Considere um processo industrial, caracterizado pela função de transferência abaixo.
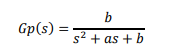
Em relação ao desempenho deste processo, pode-se afirmar que Gp(s):