Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 279 questões
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro de Controle e Automação |
Q3974476
Engenharia de Automação
Em sistemas hidráulicos industriais, a escolha do fluido
de trabalho é essencial para garantir transmissão de força,
lubrificação e proteção de componentes. Nesse contexto, o fluido
mais utilizado é o(a):
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro de Controle e Automação |
Q3974474
Engenharia de Automação
No âmbito da automação industrial, o GRAFCET é uma
ferramenta gráfica que auxilia na descrição e no planejamento de
processos sequenciais automatizados. Assim sendo, GRAFCET é
utilizado para:
Ano: 2026
Banca:
SELECON
Órgão:
EMGEPRON
Prova:
SELECON - 2026 - EMGEPRON - Engenheiro de Controle e Automação |
Q3974473
Engenharia de Automação
No contexto de automação industrial, o Controlador Lógico
Programável (CLP) é amplamente utilizado para controlar
processos e equipamentos de forma confiável e flexível. Uma das
principais vantagens do CLP é:
Ano: 2026
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2026 - IF-SP - Técnico de Laboratório/Área: Automação Industrial |
Q3891651
Engenharia de Automação
Uma prensa hidráulica possui áreas de risco
de esmagamento e corte. Durante uma auditoria,
observou-se que o operador pode acessar a zona de
prensagem enquanto o ciclo está ativo. A empresa
pretende instalar um sistema de segurança que interrompa o movimento perigoso imediatamente se
qualquer parte do corpo ultrapassar a barreira de
proteção, sem necessidade de contato físico com o
equipamento.
De acordo com os requisitos da NR-12 e princípios de segurança funcional, qual dispositivo é mais adequado para essa situação?
De acordo com os requisitos da NR-12 e princípios de segurança funcional, qual dispositivo é mais adequado para essa situação?
Ano: 2026
Banca:
FGV
Órgão:
AL-GO
Prova:
FGV - 2026 - AL-GO - Assistente Legislativo - Técnico de Refrigeração e Ar-Condicionado |
Q3881567
Engenharia de Automação
O protocolo Modbus é uma estrutura de mensagem e tem sido
utilizado em diversas aplicações de instrumentação e automação.
Entre as atividades do protocolo Modbus, é correto afirmar
Ano: 2026
Banca:
FGV
Órgão:
AL-GO
Prova:
FGV - 2026 - AL-GO - Assistente Legislativo - Técnico de Refrigeração e Ar-Condicionado |
Q3881566
Engenharia de Automação
A automação desempenha um papel central na Indústria 4.0,
permitindo a execução de processos industriais de forma
autônoma e inteligente. Quando pretendemos desenvolver e
implementar um projeto de automação industrial ou de
automação predial é necessário pensar em todos os processos
necessários para que as máquinas atuem conforme o planejado.
Diante dessa exigência, temos os protocolos de comunicação.
Em relação aos protocolos de comunicação, avalie as afirmações a seguir.
I. Uma das principais características do BACnet é seu modelo de comunicação mestre-escravo, onde um único dispositivo mestre controla múltiplos dispositivos escravos. Esse modelo permite uma troca de dados eficiente e um controle centralizado.
II. O Modbus é utilizado em uma variedade de ambientes, desde edifícios comerciais até instalações industriais, para garantir que diferentes sistemas possam se comunicar de forma eficaz e utiliza como recurso os tipos de dados suportados em entrada analógica, saída binária e valores multiestado.
III. Ao comparar BACnet e Modbus, várias diferenças importantes emergem em termos de estrutura de protocolo, métodos de comunicação e casos de uso típicos. Essas diferenças são cruciais para que os profissionais de engenharia as compreendam a fim de selecionar o protocolo apropriado para suas aplicações específicas.
Está correto o que se afirma em
Em relação aos protocolos de comunicação, avalie as afirmações a seguir.
I. Uma das principais características do BACnet é seu modelo de comunicação mestre-escravo, onde um único dispositivo mestre controla múltiplos dispositivos escravos. Esse modelo permite uma troca de dados eficiente e um controle centralizado.
II. O Modbus é utilizado em uma variedade de ambientes, desde edifícios comerciais até instalações industriais, para garantir que diferentes sistemas possam se comunicar de forma eficaz e utiliza como recurso os tipos de dados suportados em entrada analógica, saída binária e valores multiestado.
III. Ao comparar BACnet e Modbus, várias diferenças importantes emergem em termos de estrutura de protocolo, métodos de comunicação e casos de uso típicos. Essas diferenças são cruciais para que os profissionais de engenharia as compreendam a fim de selecionar o protocolo apropriado para suas aplicações específicas.
Está correto o que se afirma em
Q3854295
Engenharia de Automação
Observe o diagrama Ladder a seguir:
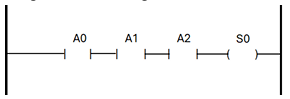
O tipo de circuito lógico representado correspondente a uma porta
Q3854283
Engenharia de Automação
São exemplos de linguagens gráficas padrão para programação de
um controlador lógico programável (CLP):
Q3852268
Engenharia de Automação
Numa condição-transição de um dado GRAFCET encontra-se a
expressão “3s/a/7s” em que a é uma variável booleana.
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Q3852242
Engenharia de Automação
A respeito da pirâmide de automação, conforme definida pela
norma ISA 95, analise os itens a seguir:
I. A pirâmide de automação possui 5 níveis, sendo o mais baixo o nível de processo e o mais alto o nível de gerenciamento corporativo.
II. Uma Interface Homem Máquina (IHM) é um dispositivo do nível de gerenciamento de planta.
III. Um Controlador Lógico Programável (CLP) é um dispositivo do nível de controle de processo.
É correto o que se apresenta em
I. A pirâmide de automação possui 5 níveis, sendo o mais baixo o nível de processo e o mais alto o nível de gerenciamento corporativo.
II. Uma Interface Homem Máquina (IHM) é um dispositivo do nível de gerenciamento de planta.
III. Um Controlador Lógico Programável (CLP) é um dispositivo do nível de controle de processo.
É correto o que se apresenta em
Q3845647
Engenharia de Automação
Avanços recentes em inteligência artificial e automação
têm alterado cadeias produtivas e serviços, aumentando
eficiência, mas também exigindo adaptação profissional.
Setores como energia, logística e atendimento ao cliente
passaram a adotar soluções baseadas em IA. Assinale a
alternativa correta:
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093958
Engenharia de Automação
A equipe técnica está acompanhando a
modernização de uma planta industrial em que o
sistema de automação deverá integrar, em tempo
real, os dados de produção dos controladores
lógicos programáveis (CLPs) com os sistemas
corporativos de gestão industrial (ERP/MES) e com
aplicações de análise em nuvem. Os engenheiros
decidiram adotar um protocolo de comunicação
padronizado que oferece interoperabilidade entre
diferentes fabricantes, segurança de dados por
criptografia e modelagem de informações
independente de plataforma. Nesse contexto, o
protocolo mais adequado para essa integração é
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093957
Engenharia de Automação
Em um painel automatizado, foram identificados
dois controladores lógicos programáveis (CLPs)
configurados em modo de operação redundante.
Para que essa configuração funcione
corretamente, é necessário que os controladores
estejam conectados na mesma rede e entre si. A
comunicação entre os CLPs redundantes é
realizada por meio de um módulo denominado
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093947
Engenharia de Automação
A característica de retroalimentação em um
manipulador robótico reflete diretamente no seu
sistema de controle no qual possui uma atuação
que pode ser descrita como
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Eletrotécnica |
Q4093934
Engenharia de Automação
Durante a integração de um sistema supervisório a
uma linha automatizada no laboratório de controle
e automação, o técnico responsável da UFABC
precisa configurar a comunicação entre
controladores lógicos programáveis (CLPs),
sensores inteligentes e o computador central.
Considerando os conceitos de protocolos de
comunicação, arquitetura de redes e redes
industriais, assinale a alternativa correta.
Ano: 2025
Banca:
FUNCERN
Órgão:
IF-PE
Prova:
FUNCERN - 2025 - IF-PE - Professor EBTT - Eletrotécnica |
Q3680421
Engenharia de Automação
Em um diagrama funcional de um sistema de automação para uma linha de produção, o motor de uma esteira
(M1) só pode ser acionado, se uma chave de partida (S1) for acionada e uma chave de segurança (LS1)
indicar que o portão de proteção está fechado. Quando M1 é acionado, um relé de tempo (KT1) inicia a
contagem. Após um retardo programado, o relé KT1 fecha um de seus contatos para energizar a bobina de um
segundo contator (K2), que aciona um motor de bomba (M2). Se o botão de emergência (S0) ou a chave de
segurança (LS1) forem atuados, todo o sistema deve ser desligado. A lógica de controle indica que
Q3642182
Engenharia de Automação
Tomás está desenvolvendo um projeto de IoT para otimizar o
acompanhamento da assiduidade escolar de crianças que
frequentam as escolas públicas, a fim de verificar se os horários
de chegada e saída da escola são compatíveis com aqueles
oferecidos em cada turno (manhã, tarde e integral).
Dentre os diversos componentes de um projeto de IoT, para capturar a hora de entrada e de saída das crianças da escola, Tomás deve usar um:
Dentre os diversos componentes de um projeto de IoT, para capturar a hora de entrada e de saída das crianças da escola, Tomás deve usar um:
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
IF-MS
Prova:
INSTITUTO AOCP - 2025 - IF-MS - Professor EBTT - Elétrica/Automação |
Q3540908
Engenharia de Automação
Uma fábrica de móveis utiliza dispositivos
atuadores na etapa de usinagem com ações de
controle do tipo ON-OFF para dispositivos
discretos e PID para a velocidade de elementos de
corte. Sobre as redes industriais e os dispositivos
descritos, assinale a alternativa correta.
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
IF-MS
Prova:
INSTITUTO AOCP - 2025 - IF-MS - Professor EBTT - Elétrica/Automação |
Q3540907
Engenharia de Automação
Uma válvula é controlada por meio de mensagens
trocadas com o CLP em barramento de rede
industrial, de modo que a malha de controle de
nível opere em estabilidade com base nos dados
enviados pelo sensor de nível instalado no
tanque. Processos de controle industrial utilizam
com frequência redes industriais para interligar
sensores, controladores e atuadores, sendo
correto afirmar que
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
IF-MS
Prova:
INSTITUTO AOCP - 2025 - IF-MS - Professor EBTT - Elétrica/Automação |
Q3540906
Engenharia de Automação
Em um processo industrial controlado por CLP,
há uma rede industrial em que dispositivos se
comunicam com o controlador por meio de
barramentos de tecnologias adequadas às
diferentes classes de equipamentos em
arquitetura distribuída. Acerca da rede DeviceNet,
é correto afirmar que