Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 279 questões
Considerando as redes industriais e os protocolos de comunicação utilizados, julgue o item subsequente.
A detecção de erros de endereçamento em ProfiBus é função do controle de acesso ao meio (MAC) do protocolo.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
A linguagem Ladder permite a construção de circuitos utilizando-se fluxo reverso de corrente elétrica, com o mesmo esquemático do circuito elétrico que se pretende representar.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Uma das dificuldades da utilização de um CLP é a impossibilidade de se realizar um temporizador para controlar a comutação de um contator.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
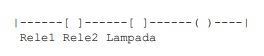
Em Ladder, para que uma lâmpada seja acesa quando um ou outro relé esteja acionado, o seguinte programa deve ser gravado em um CLP.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Na linguagem Ladder, o processador executa programas de vários degraus da direita para a esquerda e de baixo para cima.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Para implementar uma ação de parada de emergência, o botão de desligar deve ter a seguinte simbologia em Ladder.

Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
A linguagem Ladder baseia-se na lógica de relés e de contatos elétricos para o projeto e a implementação de circuitos elétricos de acionamentos.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Ladder e lista de instruções são linguagens de programação gráficas.
Com relação às linguagens de programação e aos controladores lógicos programáveis (CLP), julgue o item a seguir.
Em um diagrama Ladder, a linha da esquerda representa um barramento terra, enquanto a linha da direita representa um barramento energizado.
Acerca de conhecimentos relacionados a eletrônica analógica, eletrônica digital e automação industrial, julgue o item a seguir.
Um controlador lógico programável, em um sistema industrial, pode integrar redes de comunicação de dados informatizados.
Coluna 1 - Elementos do Sistema:
1.CLP (Controlador Lógico Programável).
2.IHM (Interface Homem-Máquina).
3.SCADA (Supervisory Control and Data Acquisition).
4.Rede Industrial (Fieldbus/Industrial Ethernet).
Coluna 2 - Funções Principais:
(__)Transporta dados entre dispositivos de campo, controladores e sistemas supervisórios através de protocolos padronizados.
(__)Executa lógica de controle em tempo real, processando entradas e acionando saídas em ciclos de scan determinísticos.
(__)Realiza supervisão centralizada, gerenciamento de alarmes, registro histórico de dados e geração de relatórios.
(__)Proporciona interface local para operação e visualização, permitindo interação direta do operador com a máquina ou processo.
A sequência correta de preenchimento das lacunas é:
( ) Protocolo influencia velocidade de atualização das telas por encapsulamento e eficiência de transmissão.
( ) Redes congestionadas causam atraso em leitura/escrita de variáveis com excesso de tags/polling.
( ) Comunicação CLP-IHM é desnecessária; IHM supervisiona sem acesso às variáveis do CLP.
( ) Taxa de atualização da IHM causa defasagem visual, mesmo com CLP executando corretamente.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Em módulos de entrada analógica de CLPs, sinais contínuos como 0–10 V ou 4–20 mA são convertidos por um conversor A/D em valores numéricos que o processador passa a tratar internamente, muitas vezes em faixas inteiras como 0 a 32767, dependendo da resolução e do fabricante (1ª parte). A IHM pode trocar dados com o CLP por meio de protocolos de comunicação industrial, permitindo ler e também escrever variáveis de memória, desde que isso esteja previsto na configuração do sistema e nas permissões definidas no projeto (2ª parte). O endereçamento de entradas e saídas em CLPs segue um padrão fixo e universal entre fabricantes, de modo que a mesma convenção de memória e notação pode ser aplicada indistintamente a qualquer marca (3ª parte).
Quais partes estão corretas?
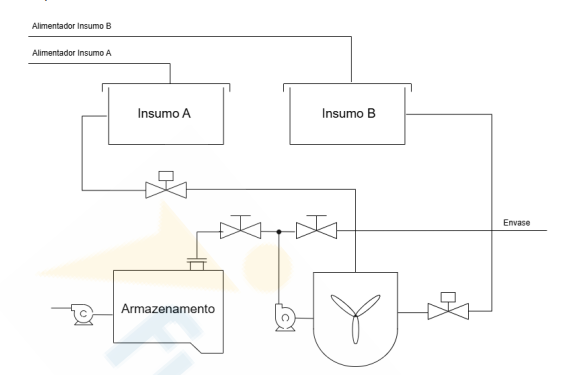
• Uma sirene que deve ser acionada somente após um atraso programado, evitando partidas imediatas.
• Um ventilador que deve continuar operando por alguns segundos após o desligamento do comando, para garantir a exaustão residual do ambiente.
Ao revisar o programa em Ladder, foi necessário distinguir o comportamento dos temporizadores empregados nessas duas etapas. Nesse caso, qual alternativa descreve corretamente a diferença principal entre um temporizador TON e um TOF?