Questões de Concurso
Sobre automação na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 142 questões
Acerca da interação humano-robô (IHR), julgue o item subsequente.
No âmbito de IHR, a técnica de personas corresponde a uma
ferramenta de desenvolvimento.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
No conceito de IHR centrada no robô, avalia-se como o robô
pode completar suas especificações de tarefas de maneira
que seja aceitável e confortável aos humanos.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
A IHR pode se dar por meio vocal, visual e tátil.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
Certos tipos de robôs de serviço também podem ser
desenvolvidos segundo a abordagem IHR.
Analise as afirmativas a seguir, relativas à automação de sistemas de distribuição.
I. No sistema primário de distribuição, a automação permite que, em caso de saída de um simples circuito, os disjuntores e dispositivos de proteção atuem no sistema para diminuir o impacto nos consumidores finais.
II. As técnicas de comunicação mais adequadas para a implementação do controle remoto / monitoramento estão restritas a comunicações do tipo por cabos, rádio móvel, transmissão por micro-ondas e comunicação com onda portadora (PLCC). Não são aceitas comunicações por rádio convencional e por uso da rede PSTN.
III. A automação de um sistema secundário requer a adição de um indicador de passagem da corrente de falta, sendo este um recurso extra para uma unidade principal de anel.
Estão corretas as afirmativas
Em uma atividade prática de robótica, foi proposto um desafio para que os alunos programem um robô para seguir uma linha no chão. Qual tipo de sensor é o mais indicado para que o robô detecte a linha e possa gerar informações para ajustar sua trajetória?
Fonte: IFSP, 2023.
Fonte: IFSP, 2023.
Acerca de projetos de sala de controle voltados para sistemas de rede, julgue o item a seguir.
A norma ISO 11064 fornece diretrizes específicas para o
design ergonômico de salas de controle, incluindo-se
recomendações para leiaute de telas, consoles, equipamentos
e detalhamentos de aspectos relevantes para sistemas de
rede.
Acerca de projetos de sala de controle voltados para sistemas de rede, julgue o item a seguir.
Ao se projetar uma sala de controle para sistemas em rede, é
importante considerar a redundância de todas as conexões e
circuitos de rede para garantir alta disponibilidade e
minimizar interrupções em caso de falhas.
Primeira coluna:
( I ) Etapa de programação.
( II) Unidade de Controle.
( III) Parte Elétrica.
( IV) Parte Mecânica.
Segunda coluna:
(__) Que possui engrenagens e outros componentes mecânicos.
(__) Normalmente, realizada com um computador.
(__) Que exige um processador.
(__) Composta por motores e sensores.
Assinale a alternativa que apresenta a correta associação entre as colunas:
Considerando-se o espaço de configurações Q desse robô, é correto afirmar que
Tendo isso em mente, considere os 3 trechos de programas apresentados a seguir.
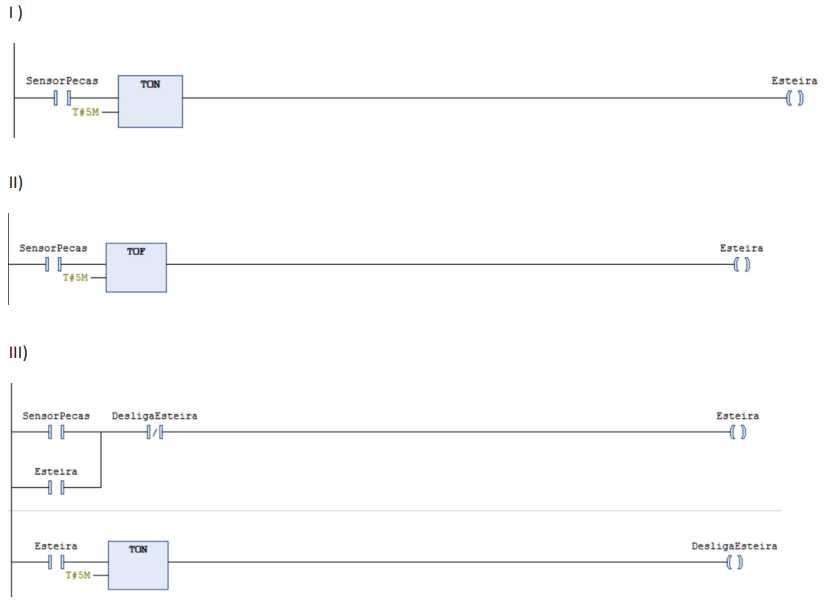
O comportamento desejado é apresentado apenas em
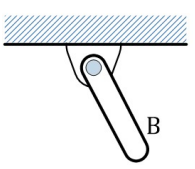
Quantos são os graus de liberdade da barra B mostrada na figura?
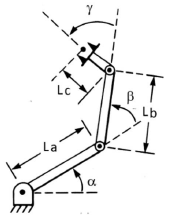
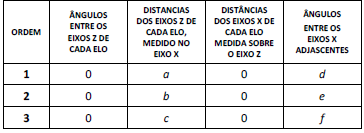 De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,
De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,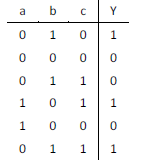 A expressão da saída (Y) na 1ª forma canônica é o que se
apresenta em
A expressão da saída (Y) na 1ª forma canônica é o que se
apresenta em