Questões de Concurso
Sobre automação na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 142 questões
Tempo verificado entre a ocorrência de uma alteração no processo e a sua percepção pelo elemento sensor:
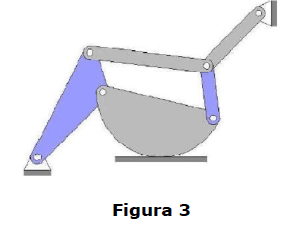
Calcule os graus de liberdade (GDL) do mecanismo da Figura 3 abaixo.
Strain gage ou extensômetros de deformação elétricos são sensores empregados em células de carga para a medição de força e massa. Com relação ao seu princípio de funcionamento dos sensores e da célula de carga, avalie o acerto das afirmações adiante e marque com V as verdadeiras e com F as falsas.
( ) Os sensores operam por princípios resistivos
( ) Para uma célula de carga operando em ponte completa são necessários no mínimo 8 sensores
( ) Quando sofrem alongamento os sensores diminuem a sua resistência elétrica
( ) A sensibilidade da célula de carga depende da tensão elétrica de alimentação
( ) O sinal de saída de uma célula de carga é da ordem de volts, não necessitando de amplificação
Marque a opção que contenha a sequência CORRETA, de cima para baixo:
Sobre o programa NC abaixo, elaborado conforme a linguagem FANUC, analise as afirmações apresentadas a seguir e marque a opção CORRETA.
O0001
N10 G17 G21 G90 G94;
N20 G53 G0 Z0 H0;
N30 T10 (FRESA DE TOPO DE 20 mm);
N40 M6;
N50 G54 S2500 M3;
N60 G0 X-20 Y40 M8;
N70 G0 G43 H10 D10 Z5;
N80 G1 Z-5 F5000;
N90 G41 G1 X0 F1500;
N100 Y100;
N110 X120;
N120 Y0;
N130 X0;
N140 Y60;
N150 G40 X-20;
N160 G0 Z5 M9;
N170 M30;
A programação de um controlador lógico programável (CLP) pode ser executada através diversas linguagens conforme os padrões definidos pela IEC 61131-3. Abaixo vemos um trecho de código específico da linguagem Ladder, na qual dois sensores A e B são entradas de sinal, utilizadas para acionar um Motor e um LED:
Figura 1: diagrama ladder.
Nesse contexto, considere as seguintes afirmações:
I. O estado do Motor e do LED são iguais independentemente do estado dos sensores A e B.
II. Quando o sensor B está acionado, o Motor estará ligado.
III. Quando o sensor A está acionado e o sensor B desacionado, o LED estará ligado.
Assinale a opção CORRETA:
Considere a tabela abaixo que contém manipuladores robóticos articulados de base fixa indicados pelas letras A, B, C e D.
Adaptado de B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo Robotics: modelling, planning and control, advanced textbooks in control and signal processing Springer, London, UK (2009)
Considerando o indicativo das flechas como um grau de liberdade de movimento (rotativo ou linear), são feitas as seguintes afirmações.
I. Os manipuladores B e C possuem o mesmo formato de área de trabalho, ou seja, um paralelepípedo.
II. O manipulador D possui área de trabalho no formato de cilindro
III. O manipulador A possui área de trabalho no formato de cilindro.
Assinale a opção CORRETA:
A partir das seguintes afirmações sobre sensores e transdutores para medição de posição:
I. Os potenciômetros, fabricados em diversos tamanhos e formatos, podem ser utilizados como sensores de posição;
II. Os encoders incrementais são dispositivos utilizados para medir posição ou velocidade angular e sua resolução é dada pelo número de pulsos por revolução;
III. O transformador diferencial linear variável (LVDT, do inglês Linear Variable Differential Transformer) é um transdutor de deslocamento utilizado, por exemplo, em válvulas proporcionais pneumáticas.
Pode-se afirmar que
A figura apresentada a seguir é um circuito eletropneumático constituído de dois atuadores para a execução de uma determinada tarefa. Analise o circuito e marque (V) para as afirmativas verdadeiras e (F), para as falsas.
( ) A ativação do relé K2 faz o atuador B recuar.
( ) A movimentação dos atuadores é de acordo com a seguinte sequência algébrica: A+ B+ (A- B-)
( ) Os sensores A1 e B1, são pré-condições de ativação dos relés K2 e K3, respectivamente.
( ) A condição para iniciar a movimentação do sistema é que o atuador A esteja recolhido (sensor A0 ativado) e o botão S seja pressionado.
( ) A ativação do relé K4 faz o atuador B avançar.
( ) O circuito eletropneumático foi feito com base no método denominado Cadeia Estacionária.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Analise o circuito abaixo e assinale as alternativas corretas.
( ) O atuador avança rápido e retorna lento por causa das válvulas de escape rápido e da válvula reguladora de vazão.
( ) Quando a haste do atuador atinge o rolete S1, ocorre o retorno automático.
( ) Durante o recuo do cilindro, o ar entra na válvula de escape rápido pela via 2 e sai pela via 1.
( ) A válvula reguladora de vazão instalada controla a velocidade do cilindro no avanço e no recuo.
( ) Ao comandar a válvula 3/2 vias de botão, o ar que entra na via 1 da válvula, sai na via 2, acionando o piloto da válvula direcional 5/2 vias. Com isso o cilindro avança.
( ) O atuador apresentado no sistema possui duplo amortecimento regulável.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Com relação aos sistemas hidráulicos responda:
I. O índice de viscosidade é a resistência que o óleo apresenta ao escoamento em função da temperatura.
II. O filtro de sucção, instalado na entrada da bomba, tem a mesma capacidade de retenção de partículas que o filtro de pressão e de retorno.
III. Atuador com relação de áreas 2:1, significa que a área do êmbolo é duas vezes maior que a área da coroa.
IV. Os fluidos hidráulicos de base mineral, por causa de suas boas propriedades, dispensa a utilização de aditivos em sua composição.
V. Quanto maior for o índice de viscosidade, menor será a variação da viscosidade em função da temperatura.
Assinale a opção CORRETA:
Um iniciante na linguagem de programação LD – Ladder Diagram – programou um controlador lógico programável – CLP –, pelo diagrama ladder representado a seguir.
A função lógica representativa deste diagrama é
Assinale a alternativa INCORRETA em relação aos TERMOPARES.
Em relação ao protocolo de comunicação Modbus RTU (Remote Terminal Unit, ou Unidade Terminal Remota), assinale a alternativa INCORRETA.
A norma IEC 61131 define que para um CLP - Controlador Lógico Programável estar de acordo com os padrões por ela estabelecidos, deve possuir ao menos duas linguagens gráficas e duas linguagens de texto para sua programação. Assinale a alternativa que possui uma linguagem de programação não padronizada.
Em 1992, a International Electrotechnical Commission (IEC — Comissão Internacional de Eletrotécnica) publicou a primeira edição da norma IEC 61131, com o objetivo de estabelecer padrões para os controladores programáveis. Essa norma foi dividida em vários capítulos, possibilitando a definição de critérios para cada um dos tópicos relacionados aos CLPs. Assinale a alternativa CORRETA em relação aos conteúdos dessa norma.