Questões de Concurso
Sobre automação na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 141 questões
t 1 : P0 + R1 → P2
t 2 : P2 + R2 → C1
t 3 : C1 → P0 + R1 + R2
t 4 : P1 + R2 → P3
t 5 : P3 + R1 → C2
t 6 : C2 → P1 + R1 + R2
A marcação inicial é M0 : 1 ficha em P0 , 1 ficha em P1 , 1 ficha em R1 e 1 ficha em R2 (demais lugares vazios), isto é, M0 = (P0=1, P1=1, R1=1, R2=1; demais=0). Em relação à alcançabilidade e deadlock (impasse) dessa rede, pode-se afirmar que:
função F(n): se n = 0, retorna 1 senão retorna F(n − 1) + 1
Para esse procedimento, o número de chamadas recursivas, incluindo a chamada inicial, e a profundidade máxima da pilha, em função de n, são, respectivamente:
z² + (−1,6 + 0,4K)·z + (0,6 − 0,08K) = 0
Para um polinômio de 2ª ordem z² + a1 ·z + a0 , a estabilidade no domínio Z (polos dentro do círculo unitário) pode ser verificada pelo critério de Jury: |a0 | < 1, 1 + a1 + a0 > 0 e 1 − a1 + a0 > 0. O intervalo de K que garante estabilidade é:
L(s) = G(s) H(s)
Admita que L(s) não possui polos no semiplano direito (P = 0). A partir do diagrama de Bode de L(jω), foram obtidas as seguintes informações:
na frequência de cruzamento de ganho ωgc (onde |L(jωgc)| = 0 dB), a fase é
 L(jωgc) ≈ −150o
L(jωgc) ≈ −150o na frequência de cruzamento de fase ωpc (onde
L(jωpc) = −180o
),
o módulo é |L(jωpc)| ≈ −8 dB Com base no método de Nyquist/Bode, esse sistema é:
Deseja-se que o lugar geométrico das raízes (LGR) passe pelo polo dominante de projeto
 . Adote as seguintes
aproximações quando necessárias:
. Adote as seguintes
aproximações quando necessárias: arctan(5,5 / 4) = 54o ;
arctan(5,5) = 80o ;
arctan(5,5 / 2,5) = 66o ;
arctan(5,5 / 21) = 15o .
Um compensador de avanço em série do tipo
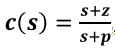 com z<p, que satisfaz a condição de ângulo no ponto Sd é:
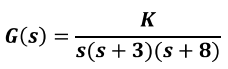
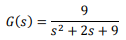
com z<p, que satisfaz a condição de ângulo no ponto Sd é: Considere a função de transferência abaixo, que representa um determinado sistema dinâmico:
Sobre a estabilidade deste sistema, é correto afirmar que se trata de um sistema
I. Tanto o controle escalar quanto o controle vetorial não podem ser implementados por meio de inversores de frequência;
II. O controle escalar consiste em variar a amplitude de tensão de alimentação do motor em proporção com a frequência de alimentação, permitindo o controle do motor em uma ampla faixa de velocidades;
III. O controle escalar é o método mais antigo de controle de velocidade de motores de indução, não sendo utilizado atualmente por ser considerado ineficiente;
IV. O soft-starter é um equipamento capaz de mitigar as altas correntes de partida dos motores de indução, não sendo empregado para o controle de velocidade continuamente.
Está correto o que se afirma em
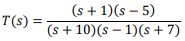
Sendo assim, a função de transferência em malha fechada é
Sobre a resposta dessa planta a uma entrada em degrau, é correto afirmar que a planta apresentará uma
Considere o diagrama Ladder abaixo com entradas digitais X1, X2, X3 e saídas digitais Y1, Y2, Y3
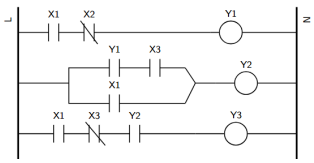
Analise os itens a seguir:
I. Se X1 = 1 e X3 = 0, então a saída Y3 será acionada independentemente do valor de X2.
II. Se X2 = 1, a saída Y1 estará necessariamente desligada.
III. A saída Y2 só pode ser acionada se pelo menos uma das saídas Y1 ou Y3 estiver acionada.
IV. A saída Y3 só será acionada se a saída Y2 também estiver acionada.
Está correto o que se afirma em
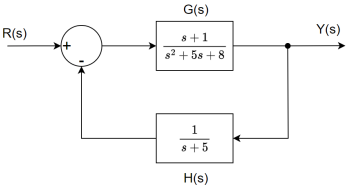
Considere o sistema de controle em malha fechada a seguir.
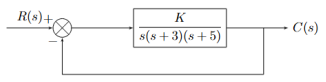
É correto afirmar que o sistema
A dinâmica aproximada de uma junta de robô é descrita por:

com os parâmetros numéricos:

Assinale a opção correta.
Assinale a opção que apresenta o número de atuadores que são necessários para movimentar esse robô de modo previsível e controlado.
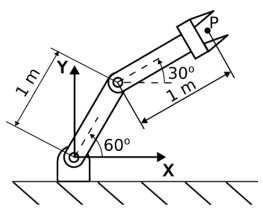
Considerando que os elos móveis possuem comprimentos iguais a 1 m, obtenha a cinemática direta, ou seja, a posição do efetuador, ponto P, em coordenadas cartesianas para o instante mostrado na figura.