O Modelo de Denavit-Hartenberg (D-H) mostra que um robô pod...
Próximas questões
Com base no mesmo assunto
Q1755630
Engenharia Mecatrônica
O Modelo de Denavit-Hartenberg (D-H) mostra que um robô
pode ser especificado ao se descrever os valores dos parâmetros
para cada elo. A figura a seguir apresenta o braço de robô
manipulador RRR. 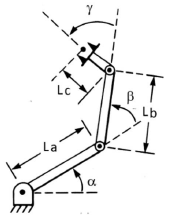
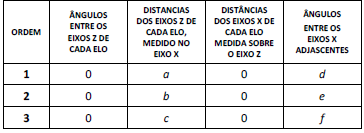 De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,
De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,
De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,