Questões de Concurso
Sobre controladores em engenharia de automação
Foram encontradas 81 questões
Q3854294
Engenharia de Automação
Um controlador PID foi utilizado para controlar um sistema de
pressurização de óleo em uma plataforma hidráulica de elevação.
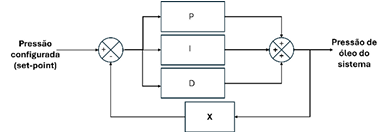
A partir do diagrama de blocos, de acordo com a teoria de controle PID, marque a opção que contém o componente correto a ser instalado no bloco indicado com a letra X.
A partir do diagrama de blocos, de acordo com a teoria de controle PID, marque a opção que contém o componente correto a ser instalado no bloco indicado com a letra X.
Q3854289
Engenharia de Automação
O controlador PID é um popular sistema utilizado na indústria para controlar grandezas como pressão, temperatura, vazão, entre outras.
Esse tipo de controle ocorre comumente em malha fechada, através de uma linha de realimentação (feedback) que tem a função de
Q3852606
Engenharia de Automação
No domínio da Automação Industrial, o CLP utiliza módulos PID,
que são empregados em aplicações em anel fechado para que a
variável controlada possa retornar ao set-point pré-fixado. O
algoritmo PID calcula o sinal atuantes (U) sobre o sinal de erro (E).
Sobre as ações do controlador PID, assinale a opção correta.
Sobre as ações do controlador PID, assinale a opção correta.
Q3852269
Engenharia de Automação
Seja o problema do regulador quadrático ótimo para um sistema
linear descrito pela equação de estados:
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
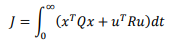
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
Q3852262
Engenharia de Automação
Um sistema com equação de estados:
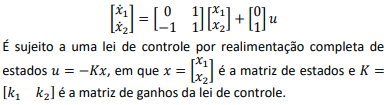
Os valores dos ganhos k1 e k2 para que o sistema em malha fechada tenha polos duplos em −2 são, respectivamente
Q3852259
Engenharia de Automação
Considere o traçado do lugar das raízes para o sistema com função
de transferência G(s) = 1/(s3 + 6s2 + 25s) em série com um ganho
real positivo numa malha de realimentação unitária negativa.
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
Q3852258
Engenharia de Automação
Considere a planta G(s) = 1/(s3 + 6s2 + 5s) em série com um ganho
proporcional kp positivo numa malha de realimentação negativa
unitária.
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
Q3851252
Engenharia de Automação
Em um sistema de controle de temperatura de um forno industrial,
o controlador compara a temperatura desejada (setpoint) com a
temperatura atual medida pelo sensor e ajusta a potência do
aquecedor.
No cenário, foi descrito o sistema de controle
No cenário, foi descrito o sistema de controle
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
UFABC
Prova:
INSTITUTO AOCP - 2025 - UFABC - Técnico de Laboratório - Área: Mecatrônica |
Q4093947
Engenharia de Automação
A característica de retroalimentação em um
manipulador robótico reflete diretamente no seu
sistema de controle no qual possui uma atuação
que pode ser descrita como
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
SANESUL
Prova:
INSTITUTO AOCP - 2025 - SANESUL - Técnico em Automação |
Q3539194
Engenharia de Automação
Uma bomba com motor trifásico foi instalada com
o objetivo de realizar a transferência entre dois
reservatórios de abastecimento de água. Para
garantir uma operação que varie a velocidade de
transferência do fluido, de acordo com o pico de
consumo de um do reservatório a jusante, qual
função de controle pode ser utilizada no inversor
de frequência?
Ano: 2025
Banca:
INSTITUTO AOCP
Órgão:
SANESUL
Prova:
INSTITUTO AOCP - 2025 - SANESUL - Técnico em Automação |
Q3539186
Engenharia de Automação
Para evitar a oscilação da saída de um
controlador de temperatura quando o valor de
configuração é atingido, um técnico de
automação pode parametrizar um intervalo de
atuação no processo. Esse intervalo é conhecido
como
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270300
Engenharia de Automação
O circuito eletrônico mostrado a seguir permite implementar um controlador Proporcional-Integral, cuja
entrada é o sinal de erro e (t) e a saída é o sinal de controle u (t).
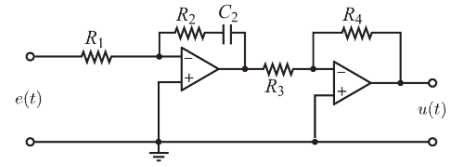
Sabendo que a função de transferência do circuito é dada por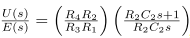 , assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
, assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
Sabendo que a função de transferência do circuito é dada por
, assinale a
alternativa que apresenta a relação correta entre os elementos de circuito e os ganhos Proporcional ( kp)
e Integral ( ki):
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270290
Engenharia de Automação
Relativamente ao controlador lógico programável (CLP), é INCORRETO afirmar:
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270289
Engenharia de Automação
Sobre controlador lógico programável (CLP), é correto afirmar:
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270288
Engenharia de Automação
Em relação ao dispositivo do tipo controlador lógico programável (CLP), assinale V (verdadeiro) ou F
(falso) nas alternativas a seguir.
(__) É como um computador pessoal, PC, podendo-se usar sistema operacional baseado em Windows ou Linux, como o Ubuntu.
(__) É equipado com interfaces de entrada e saída especiais para a conexão de sensores e atuadores industriais.
(__) Por ser um dispositivo digital, não é capaz de processar sinais analógicos.
(__) Para controlar processos industriais, o CLP requer um grande número de relés para a realização de comparações e análises lógicas.
(__) Os programas ou softwares de controle gravados em um CLP devem ser regravados no caso de o dispositivo ter permanecido desligado por vários dias.
A sequência correta é
(__) É como um computador pessoal, PC, podendo-se usar sistema operacional baseado em Windows ou Linux, como o Ubuntu.
(__) É equipado com interfaces de entrada e saída especiais para a conexão de sensores e atuadores industriais.
(__) Por ser um dispositivo digital, não é capaz de processar sinais analógicos.
(__) Para controlar processos industriais, o CLP requer um grande número de relés para a realização de comparações e análises lógicas.
(__) Os programas ou softwares de controle gravados em um CLP devem ser regravados no caso de o dispositivo ter permanecido desligado por vários dias.
A sequência correta é
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270284
Engenharia de Automação
Para o sistema dinâmico G(s) da equação, determine os ganhos kp, ki, kd, do controlador Proporcional-Integral-Derivativo (PID), usando a tabela de sintonia baseada nos parâmetros de um modelo de
segunda-ordem para quando 
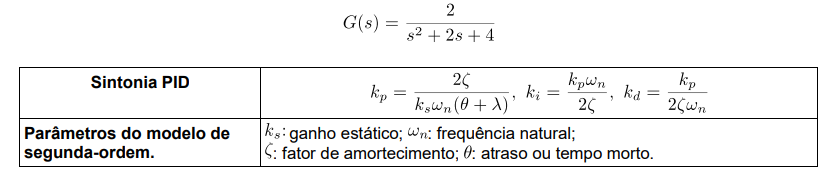
Os ganhos kp, ki, kd, que sintonizam esse controlador PID são:
Os ganhos kp, ki, kd, que sintonizam esse controlador PID são:
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270283
Engenharia de Automação
O diagrama de blocos mostrado a seguir representa um sistema do tipo regulador dinâmico via
realimentação de estado estimado. O vetor de estado estimado é x̂ (K) e a saída estimada é ŷ (K).
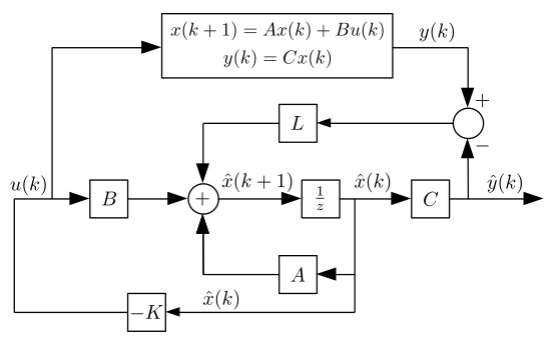
Em relação ao diagrama, assinale V (verdadeiro) ou F (falso) nas alternativas seguintes.
(__) A dinâmica de malha fechada pode ser descrita por x (k +1) = Ax (k) - BK x̂ (k).
(__) O estimador de estado é descrito por x̂ (k) = (A - LC) x̂ (k - 1) + Bu (k - 1).
(__) Os autovalores da matriz A devem estar contidos no círculo unitário do plano z.
A sequência correta é
Em relação ao diagrama, assinale V (verdadeiro) ou F (falso) nas alternativas seguintes.
(__) A dinâmica de malha fechada pode ser descrita por x (k +1) = Ax (k) - BK x̂ (k).
(__) O estimador de estado é descrito por x̂ (k) = (A - LC) x̂ (k - 1) + Bu (k - 1).
(__) Os autovalores da matriz A devem estar contidos no círculo unitário do plano z.
A sequência correta é
Ano: 2025
Banca:
CEPS-UFPA
Órgão:
UFOPA
Prova:
CEPS-UFPA - 2025 - UFOPA - Engenheiro/Área: Automação |
Q3270281
Engenharia de Automação
Considere o controlador Proporcional-Integral mostrado a seguir.

Operando com um período de amostragem Ts, a síntese digital desse controlador obtida pela
aproximação Backward,  é descrita pela seguinte equação a diferenças no tempo discreto K:
é descrita pela seguinte equação a diferenças no tempo discreto K:
Ano: 2024
Banca:
Instituto JK
Órgão:
Prefeitura de Alto Alegre do Maranhão - MA
Prova:
Instituto JK - 2024 - Prefeitura de Alto Alegre do Maranhão - MA - Engenheiro Eletricista |
Q3983964
Engenharia de Automação
Em um sistema de controle a malha fechada,
a realimentação do sinal de saída para a
entrada do sistema é fundamental. Qual é a
principal função dessa realimentação, do
ponto de vista elétrico?
Ano: 2024
Banca:
INSTITUTO AOCP
Órgão:
SANEPAR
Prova:
INSTITUTO AOCP - 2024 - SANEPAR - Profissional - Engenheiro Controle e Automação |
Q3451735
Engenharia de Automação
Em um sistema de controle com malha fechada,
um processo monitorado retorna um valor de erro
com sinal negativo. Nesse cenário, é correto
afirmar que o controlador deve realizar uma ação
de