Questões de Concurso
Sobre controladores em engenharia de automação
Foram encontradas 80 questões
A lógica desejada requer que o motor deve ser acionado quando o botão de partida (START) for pressionado e o botão de parada (STOP) não estiver acionado. Além disso, o motor deve permanecer ligado (auto-retenção) até que o botão STOP seja pressionado.
Assinale a opção que apresenta corretamente essa lógica, em conformidade com os princípios da programação.
Com relação à automação industrial, julgue o item subsecutivo.
Nos sistemas de controle de malha aberta, a saída do sistema interfere na ação de controle.
Acerca de controle de processo e de operações unitárias, julgue o item a seguir.
O controle feedforward corrige o processo com base exclusivamente na medição da variável controlada, sem considerar perturbações mensuráveis.
Acerca de controle de processo e de operações unitárias, julgue o item a seguir.
A ação integral em um controlador é capaz de eliminar erro em regime permanente em várias aplicações de controle, porém pode aumentar a tendência a sobressinal e a oscilações.
Julgue o próximo item, a respeito do controle de processos e da sintonia do controlador PID (proporcional-integral-derivativo).
Em um sistema de malha fechada, podem ser utilizados o ganho de um controlador proporcional que cause uma oscilação sustentada na planta e o período dessa oscilação para calcular os parâmetros PID.
Julgue o próximo item, a respeito do controle de processos e da sintonia do controlador PID (proporcional-integral-derivativo).
O método da curva de reação para determinar os parâmetros de um controlador PID utiliza, como sinal de ensaio, um sinal senoidal na entrada da planta a ser controlada.
Assinale a alternativa correta sobre essas estratégias.
(__)Aumentar a ação derivativa de um controlador Proporcional Integral Derivativo tende a tornar a resposta do sistema mais lenta, porém reduz significativamente as oscilações em alta frequência.
(__)No diagrama de Bode, a margem de fase é definida como a defasagem adicional necessária para que o sistema atinja cento e oitenta graus na frequência em que o ganho é de zero decibéis.
(__)No espaço de estados, um sistema é considerado completamente controlável se for possível transferir qualquer estado inicial para qualquer outro estado final em um intervalo de tempo finito.
(__)A estabilidade de um sistema discreto no plano Z é garantida se todos os polos da função de transferência estiverem localizados fora do círculo unitário centrado na origem.
Após análise, assinale a alternativa que apresenta a sequência correta dos itens acima, de cima para baixo:
I.O controle em cascata consiste em duas malhas de controle sobrepostas, onde a saída do controlador mestre define o set-point do controlador escravo.
II.O controle antecipativo utiliza a medição de distúrbios externos para agir preventivamente sobre a variável manipulada antes que o erro apareça na saída.
III.A estratégia de controle On-Off é recomendada para processos que exigem alta precisão e onde a variável manipulada deve variar suavemente entre zero e cem por cento.
Está correto o que se afirma em:
Mantendo-se uma margem de segurança no controle do processo, o nível de líquido no reservatório é mantido sempre entre um nível mínimo e um nível máximo, cujos valores de saída do sensor são 1,8V e 4,8V, respectivamente. Para gerar a saída PWM (pulse width modulation) de abertura da válvula solenoide, o controlador utiliza como base uma onda quadrada de tensão positiva de período constante, ajustada com base num nível de referência, de forma que ,quando a tensão de saída do sensor de pressão é igual a 3,6V, a duração do nível alto de saída para a válvula solenoide corresponde a 50% do período do ciclo.
A figura II apresenta a visualização da saída do controlador na situação de abertura mínima da válvula.
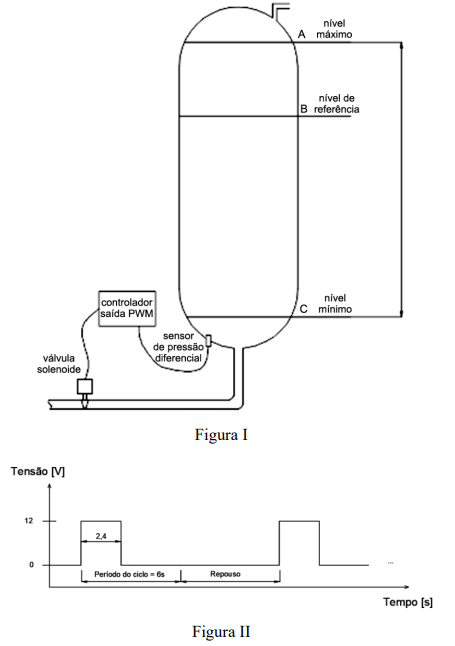
Com base nessas informações e nas figuras, julgue o item seguinte.
O sistema de controle é em malha fechada, pois o controlador utiliza o sinal do sensor de pressão como uma entrada com sinal oposto à base processada no controlador.
Mantendo-se uma margem de segurança no controle do processo, o nível de líquido no reservatório é mantido sempre entre um nível mínimo e um nível máximo, cujos valores de saída do sensor são 1,8V e 4,8V, respectivamente. Para gerar a saída PWM (pulse width modulation) de abertura da válvula solenoide, o controlador utiliza como base uma onda quadrada de tensão positiva de período constante, ajustada com base num nível de referência, de forma que ,quando a tensão de saída do sensor de pressão é igual a 3,6V, a duração do nível alto de saída para a válvula solenoide corresponde a 50% do período do ciclo.
A figura II apresenta a visualização da saída do controlador na situação de abertura mínima da válvula.
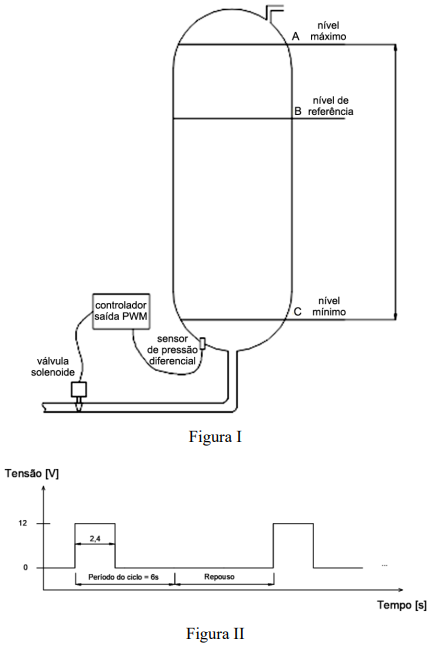
Com base nessas informações e nas figuras, julgue o item seguinte.
Considerando-se que, na faixa entre os níveis mínimo e máximo, o sistema possa ser aproximado por uma função linear em torno do nível de referência, o tempo máximo de abertura da válvula solenoide em um ciclo do processo é de 3,9 segundos.
• LIGA o aquecedor quando T ≤ 58 °C.
• DESLIGA o aquecedor quando T ≥ 62 °C.
Assuma que:
• O sensor é adequado e sem falhas.
• O sistema térmico é lento (há inércia térmica).
• Não há modulação de potência: apenas ligado ou desligado.
Assinale a alternativa que descreve corretamente o efeito principal da histerese nesse controle.