Questões de Concurso
Sobre controladores em engenharia de automação
Foram encontradas 81 questões
Q4148958
Engenharia de Automação
O software de um Sistema de Supervisão e Aquisição de Dados (SCADA), que opera em modo de execução, exibe para o usuário um ambiente gráfico que
permite:
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081691
Engenharia de Automação
O controlador do tipo PD é comumente usado no
controle desacoplado de manipuladores robóticos.
Com relação à função de transferência ideal desse
tipo de controlador, é correto afirmar que se introduz
no ramo direto da malha de controle um
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081684
Engenharia de Automação
Analise as asserções a seguir e a relação proposta entre elas.
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081679
Engenharia de Automação
Com relação à estratégia de controle via torque computado NÃO é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081673
Engenharia de Automação
Considerando-se o programa em Ladder apresentado a seguir, assinale o programa em Texto Estruturado cujo
comportamento mais se aproxima do comportamento do programa em Ladder.

Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081666
Engenharia de Automação
Considere o programa apresentado a seguir.
Sobre o seu funcionamento é correto afirmar que,
Sobre o seu funcionamento é correto afirmar que,
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081664
Engenharia de Automação
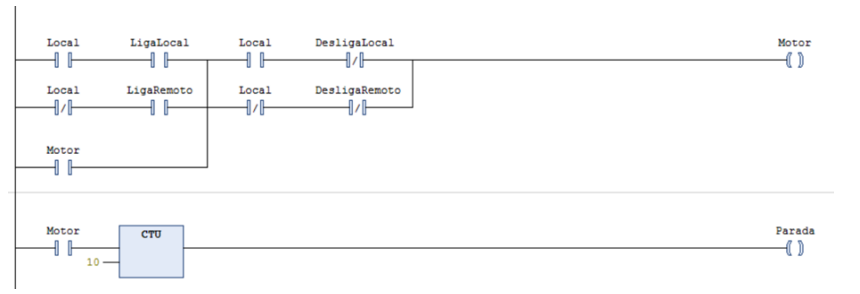
Um engenheiro, ao se esquecer do ciclo de varredura (scan) de um CLP, escreveu o seguinte programa em Ladder
para a implementação de um comando local/remoto de um motor:

Considere as seguintes afirmações sobre este programa.
I – Se a variável Local estiver acionada, o motor estará desligado.
II – Se a variável Local não estiver acionada, o motor será comandado por meio das variáveis LigaRemoto e DesligaRemoto.
III – Se a variável Local estiver acionada, o motor será comandado por meio das variáveis LigaLocal e DesligaLocal.
IV – Se a variável Local não estiver acionada, o motor estará desligado.
Está correto apenas o que se afirma em
Considere as seguintes afirmações sobre este programa.
I – Se a variável Local estiver acionada, o motor estará desligado.
II – Se a variável Local não estiver acionada, o motor será comandado por meio das variáveis LigaRemoto e DesligaRemoto.
III – Se a variável Local estiver acionada, o motor será comandado por meio das variáveis LigaLocal e DesligaLocal.
IV – Se a variável Local não estiver acionada, o motor estará desligado.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081658
Engenharia de Automação
Considere o diagrama de Bode apresentado na figura
a seguir.
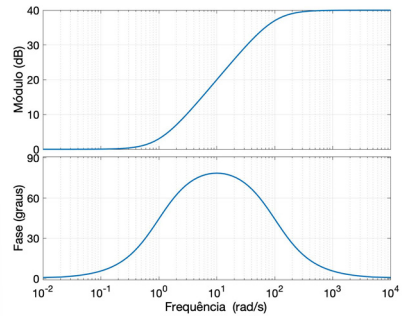
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081655
Engenharia de Automação
Sobre controladores é INCORRETO afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081654
Engenharia de Automação
É INCORRETO afirmar que
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050440
Engenharia de Automação
Uma vantagem do método de controle quadrático é fornecer um modo sistemático de cálculo da matriz de ganho de
controle por realimentação de estado. Sobre os sistemas
reguladores ótimos, assinale a afirmativa INCORRETA.
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050431
Engenharia de Automação
A imagem a seguir ilustra uma malha de controle de pressão:
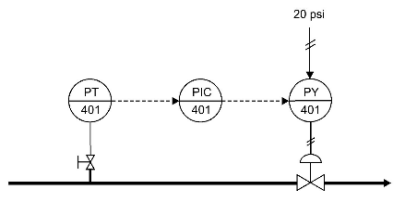
Considerando o exposto, assinale a afirmativa INCORRETA.
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541195
Engenharia de Automação
Em relação às afirmativas sobre o controle Proporcional-Derivativo (PD) com compensação da gravidade:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Q1209459
Engenharia de Automação
Assinale a alternativa que NÃO apresenta uma característica relacionada aos controlados lógicos programáveis (CLP´s):
Ano: 2014
Banca:
CETRO
Órgão:
AEB
Prova:
CETRO - 2014 - AEB - Tecnologista Júnior - Desenvolvimento Tecnológico |
Q483870
Engenharia de Automação
Quando se utiliza um controlador proporcional, integrativo e derivativo PID (Proporcional Integrativo Derivativo), cada parcela deve ser ajustada aumentando ou diminuindo seu fator de ganho. Imagine um veículo que deve seguir um curso estável. Ele apresenta um deslocamento em relação à posição desejada, mantendo um erro estacionário. Assinale a alternativa que apresenta a alteração que deve ser realizada no PID para reduzir esse tipo de erro.
Ano: 2012
Banca:
CESGRANRIO
Órgão:
TERMOBAHIA
Prova:
CESGRANRIO - 2012 - TERMOBAHIA - Técnico de Instrumentação Júnior |
Q2966801
Engenharia de Automação
Uma malha de controle de um processo é constituída de diversos elementos, os quais podem ser classificados segundo sua função na malha.
Assim, o
Ano: 2012
Banca:
COPESE - UFT
Órgão:
Transpetro
Prova:
COPESE - UFT - 2012 - DPE-TO - Analista em Gestão Especializado - Biblioteconomia |
Q272916
Engenharia de Automação
A resposta transitória de um sistema de controle a uma perturbação degrau pode ser representada pelo gráfico abaixo, no qual se vê a curva de resposta a uma perturbação degrau unitário.

A respeito das representações das características da resposta transitória observada no gráfico, é INCORRETO que o tempo
A respeito das representações das características da resposta transitória observada no gráfico, é INCORRETO que o tempo
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262949
Engenharia de Automação
A análise de sistemas de controle de automação envolve conhecimentos sobre o funcionamento de seus componentes eletrônicos. A esse respeito são feitas as afirmativas:
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192346
Engenharia de Automação
A famosa sequência de Fibonacci pode ser definida como o sinal x(n), discreto, causal e infinito, cujas primeiras amostras são

A sua lei de formação para pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
A sua lei de formação para
pode ser expressa como Aplicando a Transformada Z no sinal x(n), resulta a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Técnico de Operação Júnior |
Q182312
Engenharia de Automação
Com relação aos sistemas de controle de processo por malha fechada, considere as afirmativas a seguir.
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em