Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
seguem acerca desse assunto.

Com base nas informações e na figura acima, julgue os itens subsequentes.
 .
.Com base nas informações e na figura acima, julgue os itens subsequentes.
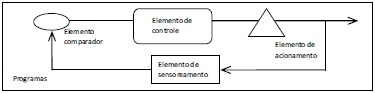
No esquema de controle ilustrado na figura abaixo, a função do elemento de acionamento é efetuar a regulação da planta, mediante informações oriundas dos sensores instalados nela.
Em um sistema de controle, os controladores podem ser classificados de acordo com o tipo de tecnologia utilizada na sua construção. Em geral, destacam-se três tipos de controladores: pneumáticos, hidráulicos e eletrônicos (analógicos e digitais). A seleção do tipo de controlador a ser utilizado é independente do tipo de processo, pois essa escolha se baseia na energia disponível para alimentação, nas condições de segurança, no custo, na precisão, na confiabilidade, no peso e nas dimensões do equipamento.

Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
A função de transferência do sistema de tempo contínuo é
expressa por 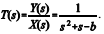
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é do tipo FIR (finite impulse
response, ou resposta finita ao impulso).
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é estável.
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo contínuo será instável se b for maior
que –1.
Qual mudança deve ser feita na sintonia desse controlador para reduzir o percentual de ultrapassagem?


Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por:
 .
.Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por:
.Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.