Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262950
Engenharia Eletrônica
O controlador frequentemente utilizado em sistemas de controle em malha fechada é o
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262947
Engenharia Eletrônica
Um circuito elétrico tem uma função de transferência dada por G(s) = 
Para que o sistema seja estável, é necessário e suficiente que
Para que o sistema seja estável, é necessário e suficiente que
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TRE-RJ
Prova:
CESPE / CEBRASPE - 2012 - TRE-RJ - Analista Judiciário - Engenharia Elétrica |
Q259600
Engenharia Eletrônica
Considere que o modelo de um sistema contínuo seja representado pela função de transferência
H(s) = K
(s+4)(s+2)
Utiliza-se a transformada bilinear, que permite o mapeamento do plano complexo s no plano complexo z, mediante a transformação s = (2⁄t) z-1⁄z+1 em que T é o período de amostragem, com valor convenientemente utilizado.
Com base nessas informações, julgue o item abaixo.
Os polos da função de transferência no plano z, correspondente ao sistema discreto obtido por meio da transformação do sistema contínuo, ficarão internos a um círculo unitário, porque o sistema contínuo é estável.
H(s) = K
(s+4)(s+2)
Utiliza-se a transformada bilinear, que permite o mapeamento do plano complexo s no plano complexo z, mediante a transformação s = (2⁄t) z-1⁄z+1 em que T é o período de amostragem, com valor convenientemente utilizado.
Com base nessas informações, julgue o item abaixo.
Os polos da função de transferência no plano z, correspondente ao sistema discreto obtido por meio da transformação do sistema contínuo, ficarão internos a um círculo unitário, porque o sistema contínuo é estável.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TRE-RJ
Prova:
CESPE / CEBRASPE - 2012 - TRE-RJ - Analista Judiciário - Engenharia Elétrica |
Q259599
Engenharia Eletrônica

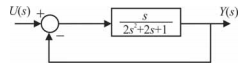
O sistema pode ser representado corretamente na forma de um diagrama de blocos, conforme figura abaixo, no qual U(s) e Y(s) são sinais de entrada e saída, respectivamente, correspondentes à transformada de Laplace de u(t) e y(t).
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TRE-RJ
Prova:
CESPE / CEBRASPE - 2012 - TRE-RJ - Analista Judiciário - Engenharia Elétrica |
Q259598
Engenharia Eletrônica
Em regime permanente, a resposta desse sistema a uma entrada em degrau é igual a zero.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TRE-RJ
Prova:
CESPE / CEBRASPE - 2012 - TRE-RJ - Analista Judiciário - Engenharia Elétrica |
Q259597
Engenharia Eletrônica
O sistema é de fase não mínima.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TRE-RJ
Prova:
CESPE / CEBRASPE - 2012 - TRE-RJ - Analista Judiciário - Engenharia Elétrica |
Q259596
Engenharia Eletrônica
A função de transferência desse sistema tem polos complexos conjugados 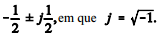
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
Banco da Amazônia
Prova:
CESPE - 2012 - Banco da Amazônia - Técnico Científico - Engenharia Elétrica |
Q257487
Engenharia Eletrônica
Texto associado
A respeito de teorias de controle, sistemas e processamento de sinais, julgue os itens a seguir.
A estabilidade de sistemas dinâmicos discretos é determinada pela posição dos polos da função de transferência desse sistema no plano complexo Z. Se todos os polos da função de transferência estiverem no interior do círculo unitário, o sistema é estável. No entanto, se houver algum polo da função de transferência fora do círculo unitário, o sistema é instável.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
Banco da Amazônia
Prova:
CESPE - 2012 - Banco da Amazônia - Técnico Científico - Engenharia Elétrica |
Q257486
Engenharia Eletrônica
Texto associado
A respeito de teorias de controle, sistemas e processamento de sinais, julgue os itens a seguir.
Há situações em que a representação de um sistema dinâmico por função de transferência não é adequada para o projeto de controladores, como, por exemplo, na situação em que o sistema apresenta variáveis de estado não observáveis.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
Banco da Amazônia
Prova:
CESPE - 2012 - Banco da Amazônia - Técnico Científico - Engenharia Elétrica |
Q257485
Engenharia Eletrônica
Texto associado
A respeito de teorias de controle, sistemas e processamento de sinais, julgue os itens a seguir.
Uma malha de controle típica possibilita que o processo controlado siga o sinal de referência e rejeite perturbações. Um controlador PID adequadamente projetado garante a rejeição de perturbações constantes que atuem na entrada do processo ou no sensor.
Ano: 2012
Banca:
FCC
Órgão:
TRF - 2ª REGIÃO
Prova:
FCC - 2012 - TRF - 2ª REGIÃO - Analista Judiciário - Engenharia - Eletrônica |
Q243384
Engenharia Eletrônica
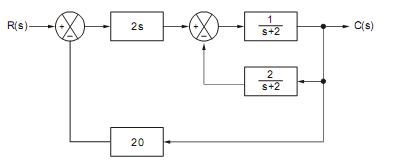
A figura abaixo corresponde ao diagrama em blocos de um sistema de controle:

A sua função de transferência é dada por:
A sua função de transferência é dada por:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Telecomunicações Júnior |
Q234228
Engenharia Eletrônica
Um dispositivo eletrônico, usado em processo industrial, gera uma tensão em sua saída que se inicia em t = 0 e cujo comportamento segue a seguinte função temporal para t ≥ 0:
V S(t) = 12 - 5e-2t cos( 10t) [volt]
Essa tensão V S(t) é aplicada sobre uma carga resistiva de 4 Ω.
O valor da tensão, em V, no instante t = 0, e o valor da potência, em W, dissipada na carga em regime permanente, respectivamente, são:
V S(t) = 12 - 5e-2t cos( 10t) [volt]
Essa tensão V S(t) é aplicada sobre uma carga resistiva de 4 Ω.
O valor da tensão, em V, no instante t = 0, e o valor da potência, em W, dissipada na carga em regime permanente, respectivamente, são:
Ano: 2012
Banca:
FCC
Órgão:
TRE-CE
Prova:
FCC - 2012 - TRE-CE - Analista Judiciário - Engenharia Elétrica |
Q220303
Engenharia Eletrônica
No sistema de controle abaixo, a função de transferência vale
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431912
Engenharia Eletrônica
Um sistema de controle discreto, com realimentação de saída, apresenta uma estrutura de compensação na malha direta, em série com a planta, cuja função de transferência do compensador é 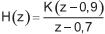
Trata-se do tipo compensador
Trata-se do tipo compensador
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431911
Engenharia Eletrônica

O diagrama em bloco acima mostra o modelo de um sistema linear, discreto e causal, no domínio da variável complexa z.
A função de transferência que relaciona a saída com a entrada é
A função de transferência que relaciona a saída com a entrada é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431908
Engenharia Eletrônica

O gráfico acima mostra a curva de módulo do diagrama de BODE da função de transferência 
Com base nesse gráfico, o valor do ganho K é
Com base nesse gráfico, o valor do ganho K é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431907
Engenharia Eletrônica
Texto associado
Considere o enunciado a seguir para responder às questões de nos 26 e 27.

O diagrama em blocos acima mostra o modelo simplificado de um motor DC. A saída é a velocidade angular [rad/s] representada pelo sinal Ω(s), e as entradas são: tensão na armadura V(s) e torque de carga T(s). Com base nesse diagrama:
Aplicando o princípio da superposição, qual a função de transferência que liga o torque de carga T(s) à velocidade angular Ω(s)?
Aplicando o princípio da superposição, qual a função de transferência que liga o torque de carga T(s) à velocidade angular Ω(s)?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431906
Engenharia Eletrônica
Texto associado
Considere o enunciado a seguir para responder às questões de nos 26 e 27.
O diagrama em blocos acima mostra o modelo simplificado de um motor DC. A saída é a velocidade angular [rad/s] representada pelo sinal Ω(s), e as entradas são: tensão na armadura V(s) e torque de carga T(s). Com base nesse diagrama:
Aplicando o princípio da superposição, qual a função de transferência que liga a tensão da armadura V(s) à velocidade angular Ω(s)?
Aplicando o princípio da superposição, qual a função de transferência que liga a tensão da armadura V(s) à velocidade angular Ω(s)?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431905
Engenharia Eletrônica
Um sistema de controle linear e contínuo, com realimentação de saída, apresenta uma estrutura de compensação na malha direta, em série com a planta, cuja função de transferência é 
Esse compensador é do tipo
Esse compensador é do tipo
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica 2011 |
Q237880
Engenharia Eletrônica
A função f : [0, + ∞ ) → ℜ é definida por f(t) = e2t sen (3t).
Se F(s)= e-st f(t) dt é a Transformada de Laplace da função f, então, para s > 2, F(s) é igual a
e-st f(t) dt é a Transformada de Laplace da função f, então, para s > 2, F(s) é igual a
Se F(s)=
e-st f(t) dt é a Transformada de Laplace da função f, então, para s > 2, F(s) é igual a