Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Um sistema de controle automático de velocidade possui o diagrama de blocos apresentado na ilustração abaixo.
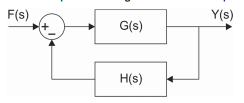
Admitindo que 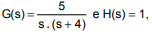 a expressão da função de transferência
a expressão da função de transferência  será
será
A norma ANSI/ISA 5.1 define a simbologia a ser aplicada na confecção de diagramas P&ID (Piping and Instrumentation Diagram).
Empregando-se a norma ISA 5.1 para representar um sistema que possua controle de vasão com uma rede de campo com transmissor/controlador e uma válvula com posicionador eletrônico, as letras A, B, C e D da figura correspondem, respectivamente a:
Com relação a sistemas de controle e processamento de sinais, julgue o item seguinte.
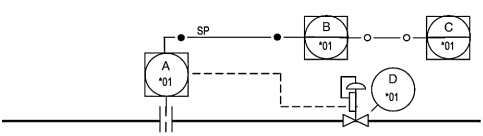
Se a função de transferência em malha fechada de um sistema
for  , ele será estável para - 20 < k < 0.
, ele será estável para - 20 < k < 0.

Considerando o diagrama de blocos precedente, que representa o transmissor de um sistema PCM, julgue o item a seguir.
Um codificador que utiliza a sinalização liga-desliga
desperdiça potência devido ao nível DC transmitido.
Considerando o diagrama de blocos precedente, que representa o transmissor de um sistema PCM, julgue o item a seguir.
A quantização representa o sinal de forma discreta tanto em
termo da amplitude quanto do tempo.
A figura abaixo mostra o controle da temperatura do ar em uma serpentina de aquecimento alimentada por água quente através de uma válvula. O sistema consiste em um transdutor de temperatura, um controlador e a válvula de água. A faixa de temperatura do transdutor é de 10 a 65 °C proporcionando uma faixa de pressão de 20 a 100 kPa. O controlador é ajustado para um ganho de 5 para 1 e a faixa de variação de mola da válvula da água quente é de 60 a 80 kPa:
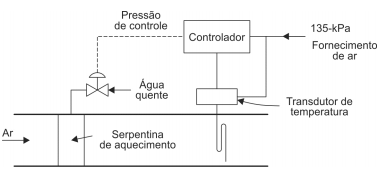
A faixa de pressão, em kPa, do transdutor de temperatura é:
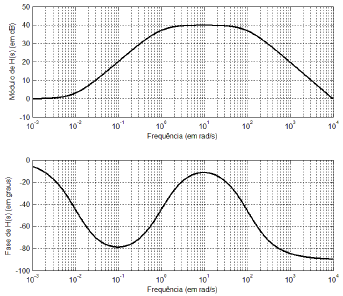
A partir da análise do gráfico, conclui-se que H(s)
O diagrama a seguir apresenta uma variante desse tipo de controlador, denominado aqui controlador modificado, a partir da modificação na estrutura clássica PID, onde:
• G(s) é a função de transferência de planta; • r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente; • KP, TI e TD são os parâmetros do controlador modificado.
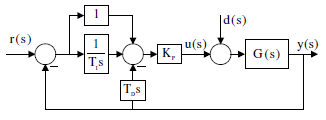
Uma das diferenças entre o controlador modificado e o controlador PID clássico é a capacidade que aquele tem de
Considere a resposta ao degrau unitário de um sistema dinâmico,
cuja função de transferência é dada por G(s) = 
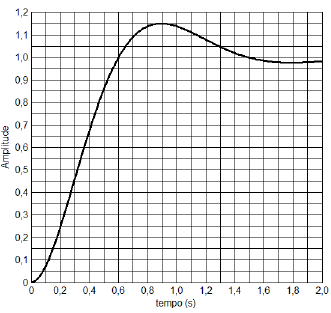
A partir da análise do gráfico, conclui-se que a resposta do
sistema apresenta
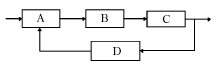
Os blocos A, B, C e D são, respectivamente, denominados de
O diagrama em blocos abaixo representa um sistema de controle PID não-interativo.
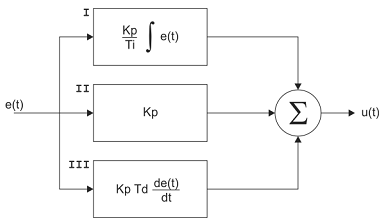
Os blocos I, II e III estão corretamente identificados em:
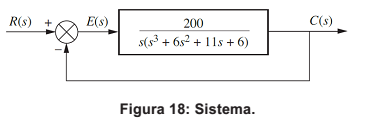
Considerando o sistema da Figura 18, assinale a alternativa correta.
Com base nas funções de transferência da Figura 16, assinale a alternativa correta.

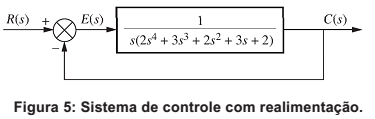
Um Engenheiro, ao analisar um projeto de sistema de controle com realimentação, deparou-se com o seguinte diagrama apresentado na Figura 5. Com base nas informações dessa figura, é correto afirmar que ela apresenta um sistema
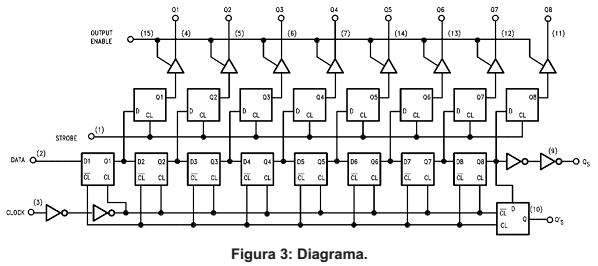
Ao analisar a Figura 3, um Engenheiro Eletricista constatou que essa figura mostra o diagrama de blocos de um
Um processo industrial foi modelado pela seguinte função de transferência:
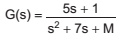
Se o parâmetro M = 12, um dos polos do modelo estará
locado na posição
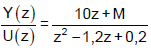
Medidas y(kT) = y(k), com k = 0,1,2, ..., são obtidas a cada intervalo de tempo T quando a entrada é um impulso unitário.
Sabendo-se que a resposta ao impulso unitário é dada pela sequência y(k) = {y(0), y(1), y(2), ...} = {0, 10, 17, ...}, qual é o valor do parâmetro M?
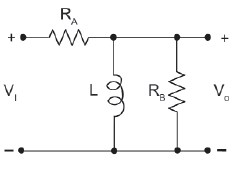
A função de transferência
 do circuito é:
do circuito é: