Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
A função de transferência de malha fechada de um sistema de controle é dada por

Este sistema possui, respectivamente, quantos polos e zeros finitos?

Um sistema de controle é constituído de uma planta, cujo modelo em malha aberta apresenta 3
polos reais e nenhum zero finito. Fechando-se a malha com realimentação de saída e variando o
ganho de malha (K) positivamente de zero a infinito, os polos se deslocam seguindo as trajetórias
mostradas no lugar das raízes da figura acima.
Dois dos polos de malha fechada seguem trajetórias assintóticas no plano complexo, ou seja, tendem para o infinito seguindo retas inclinadas em relação ao eixo real, como pode ser visto no lugar geométrico das raízes apresentado.
O ângulo de inclinação da reta pontilhada é
Um sistema de controle é constituído de uma planta, cujo modelo em malha aberta apresenta 3
polos reais e nenhum zero finito. Fechando-se a malha com realimentação de saída e variando o
ganho de malha (K) positivamente de zero a infinito, os polos se deslocam seguindo as trajetórias
mostradas no lugar das raízes da figura acima.

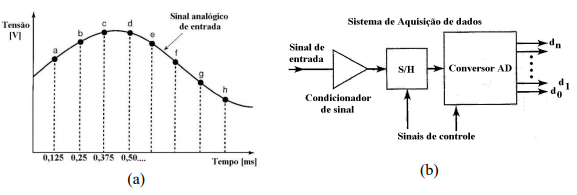
Em relação ao sinal de entrada e ao diagrama de blocos, assinale a afirmativa correta.

Considere um sistema representado no espaço de estados pelo seguinte conjunto de equações matriciais:
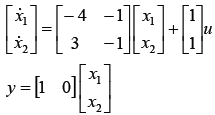
A função de transferência G(s) que representa o sistema está corretamente
indicada em:
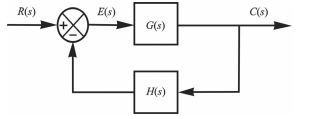
Considere o sistema de controle em malha fechada, representado pelo diagrama de blocos, mostrado na figura seguinte.
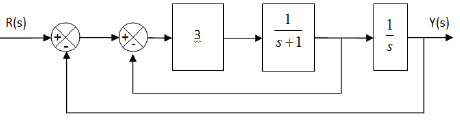
A função de transferência global Y(s)/R(s) pode ser representada
por
A questão refere-se ao sistema linear em malha
fechada, representado na figura seguinte:
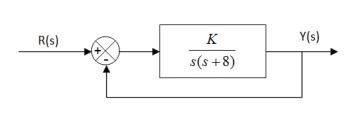
Quando é aplicado um impulso unitário, na entrada desse sistema, o sinal de saída y(t) assume a forma
y(t) = Me-σ t sen(ωt).
Assumindo que ω = 5 rad/s, o valor do ganho K será igual a
 = {3t - 5. sen(2t)}. Calcule a Transformada de Laplace e assinale a alternativa correta.
= {3t - 5. sen(2t)}. Calcule a Transformada de Laplace e assinale a alternativa correta.
De acordo com a teoria de controle, julgue o item subsecutivo.
Um sistema linear invariante no tempo (LIT) será considerado
estável se todas as raízes do polinômio do denominador de sua
função de transferência tiverem parte real negativa.
De acordo com a teoria de controle, julgue o item subsecutivo.
As equações de estado de um sistema LIT podem ser resolvidas tanto no domínio do tempo quanto no domínio da frequência.
Considerando a figura precedente, que ilustra o diagrama de blocos de um sistema de controle com realimentação, assinale a opção correta, acerca dos métodos de análise de estabilidade desse sistema.
 , assinale a opção que apresenta o período de
tempo aproximado, em segundos, que o sistema leva para atingir
o regime permanente ao ser excitado por uma função degrau.
, assinale a opção que apresenta o período de
tempo aproximado, em segundos, que o sistema leva para atingir
o regime permanente ao ser excitado por uma função degrau.