Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
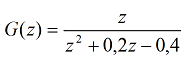
Considerando que a função de transferência à Malha Fechada de um sistema de controle digital é dada pela expressão abaixo, assinale a alternativa correta quanto à condição de estabilidade do sistema e os valores dos polos.
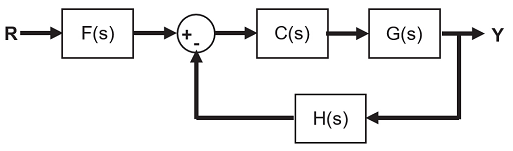
Determine a relação entre Y e R no sistema a seguir.
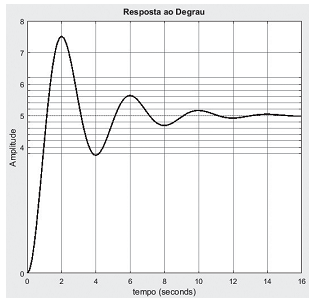
Dada a resposta ao degrau de um sistema dinâmico, determine os valores do sobressinal (Mp) e do tempo de acomodação (ta) para um critério de erro de 5%.
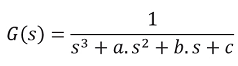
Utilize o método de Routh-Hurwitz para determinar os valores de a, b e c que garantem a estabilidade do sistema:
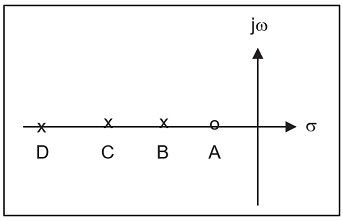
Considerando a distribuição de polos e zeros de um sistema em Malha Aberta no plano s, mostrada a seguir, indique o Lugar Geométrico das Raízes para o sistema em Malha Fechada.
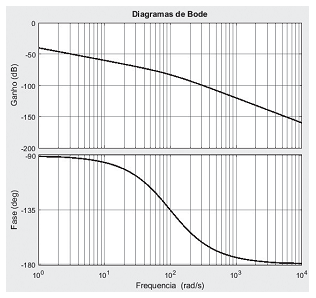
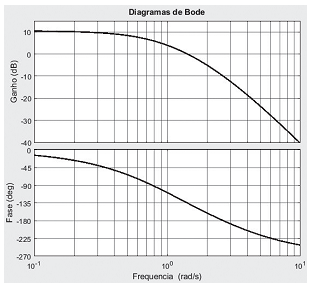
Considerando os Diagramas de Bode de um sistema de segunda ordem, mostrados abaixo, identifique os polos desse sistema.
Dados os Diagramas de Bode de um sistema de primeira ordem em Malha Aberta, determine
os valores de K e  da equação mostrada abaixo.
da equação mostrada abaixo.
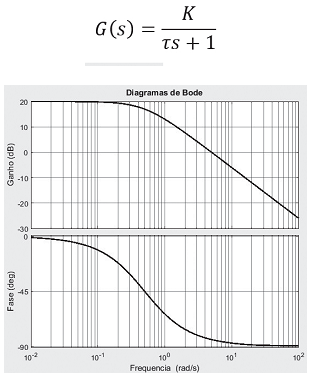
Os valores de K e  são:
são:
Determine as Margens de Ganho (MG) e de Fase (MF) nos diagramas de Bode em Malha Aberta e conclua sobre a estabilidade do sistema em Malha Fechada.
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
Em um sistema linear cuja função de transferência seja
dada por G(s) = B(s)/A(s), os polos do sistema serão
sempre dados pelos coeficientes do polinômio A(s).
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
No projeto de controle por realimentação do vetor de
estados, os polos do sistema não podem ser alocados em
qualquer local, sendo restringidos pelo lugar geométrico
das raízes.
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
Um sistema de tipo 0 apresenta erro constante, em
regime permanente, em resposta a uma entrada em
degrau.
Acerca de controle linear, julgue o item a seguir.
O controle derivativo deve ser usado sozinho para evitar-se o incremento do erro atuante.Seja o sistema descrito pela equação de estado:
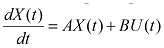
Y = CX(t)
Onde:

Encontre o valor da constante “a” (se possível) que estabilize este sistema.
Considere a seguinte função de transferência:
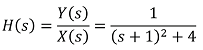
Considerando-se x(t)=u(t), determine, a partir de y(t), a resposta do sistema em estado estacionário.
Considere o sistema apresentado abaixo. Suponha a=1 e b=2.
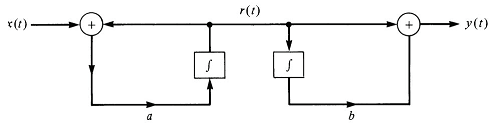
Determine a função de transferência do sistema. Este sistema é assintoticamente estável,
marginalmente estável ou instável?
Considere a seguinte EDO:

Encontre os pólos do sistema e determine se o sistema é estável ou instável. Considere o sistema
causal e com condições iniciais nulas.
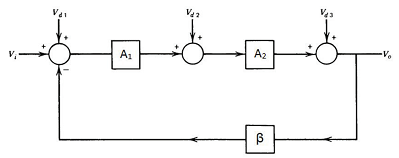
A realimentação negativa pode ser utilizada para reduzir a sensibilidade do sistema para certos tipos de distúrbios. Este tipo de vantagem é ilustrado na figura a seguir, que apresenta um sistema com 3 tipos distintos de distúrbios aplicados ao sistema. O distúrbio Vd1 é aplicado ao sistema junto com o sinal de entrada e está relacionado ao ruído associado ao próprio sinal de entrada. O distúrbio Vd2 é aplicado em um ponto médio do sistema e pode estar relacionado ao uma filtragem incorreta feita ao sinal proveniente da etapa inicial. Já o distúrbio Vd3 é aplicado na saída do sistema e pode estar relacionado com as mudanças da carga. Assim, analise, através da equação que relaciona Vo com Vi, A1 , A2 e β, se efeitos de distúrbio (Vd1, Vd2 e Vd3) serão reduzidos por conta da realimentação negativa. Considere que os ganhos de malha aberta A1 e A2 possuem valores muito altos e que β seja igual a 1.
Considere o seguinte x sistema dinâmico representado no Espaço de Estados
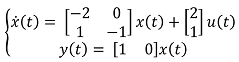
Pode-se dizer que este sistema é:
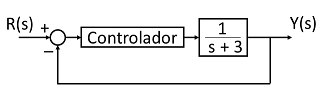
Qual é o erro em regime permanente do sistema de controle a seguir se o controlador utilizado for um do tipo Proporcional-Integral (PI) com constantes KP = 12, KI = 2, e a entrada for do tipo degrau?