Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 650 questões
Um sistema foi modelado pelas seguintes equações de estado:
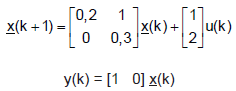
A função de transferência G(z) =  que corresponde a
esse modelo é:
que corresponde a
esse modelo é:
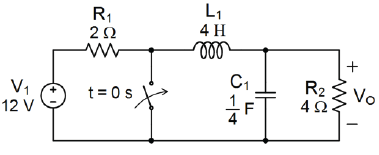
Assim, a transformada de Laplace da tensão VO após o fechamento da chave é dada por:
Um sistema elétrico linear tem como sinal de entrada uma tensão v(t), e como saída um sinal de corrente i(t). Sua dinâmica é modelada pela seguinte equação diferencial:
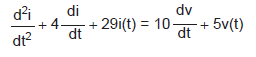
A função de transferência desse sistema, no domínio de Laplace, é obtida pela relação H(s) = I(s)/ V(s) , onde I(s) e V(s) são as transformadas de Laplace aplicadas, respectivamente, sobre os sinais i(t) e v(t).
A função de transferência desse sistema apresenta, no plano S de Laplace, um zero real em
Seja um sistema de 2a ordem, linear e analógico, que liga um sinal U de entrada ao sinal Y de saída e cujo modelo é representado pela função de transferência
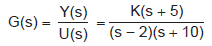
Esse modelo foi submetido a uma realimentação proporcional de saída, fazendo com que o ganho K varie no intervalo 0 < K < + ∞.
Na configuração acima descrita, vai ocorrer que, para um determinado valor do ganho K, um dos dois polos de malha fechada será zero, e o outro polo, consequentemente, terá valor igual a
Um sistema linear de 2a ordem é modelado em função de transferência por uma planta do tipo G(s) = K N(s)/ D(s) , em que N(s)é o polinômio do numerador, e D(s) é o polinômio do denominador.
Quando esse sistema é submetido a uma realimentação proporcional de saída, e o ganho K varia de 0 a + ∞ , os polos se movimentam no plano complexo, formando trajetórias que se caracterizam como o lugar das raízes, mostrado na Figura a seguir.
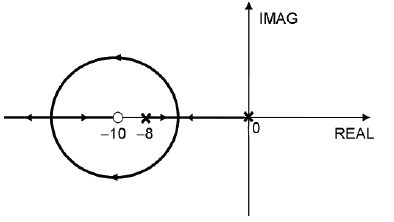
Com base nos dados da Figura acima, a expressão da Função de Transferência de Malha Fechada em função do ganho K é
Considere um sistema linear, contínuo e invariante no tempo, submetido a uma realimentação proporcional de saída. A função de transferência em malha fechada é K/s3 +102 +15s + K , em que K > 0 é o ganho proporcional de realimentação.
Qual o valor do ganho K no limiar da instabilidade desse
sistema em malha fechada?
A partir de um sistema definido pelas seguintes equações no espaço de estados:
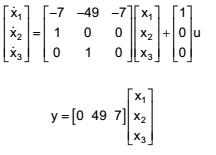
Conclui-se que a função de transferência equivalente do
sistema é
Um engenheiro deseja alocar os polos do sistema, representado pelas equações de estado abaixo, para as posições -1, -3 e -6.
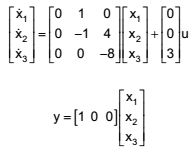
Levando-se em conta a função de transferência equivalente do sistema, qual o controlador K de realimentação de estados
que esse engenheiro deve projetar?
Para analisar o comportamento de um sistema representado pela função de transferência 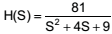 um engenheiro
está interessado em determinar as margens de ganho e fase do sistema, utilizando os diagramas de Bode ilustrados
na Figura abaixo.
um engenheiro
está interessado em determinar as margens de ganho e fase do sistema, utilizando os diagramas de Bode ilustrados
na Figura abaixo.
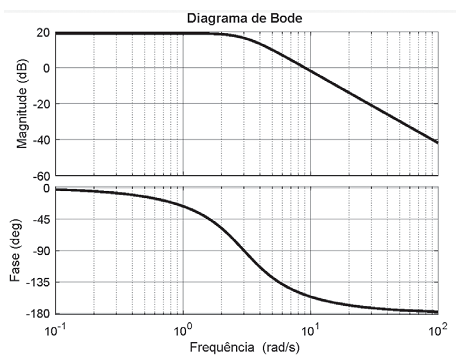
Qual a margem de fase aproximada desse sistema, em graus?
Um engenheiro de equipamentos está trabalhando em uma planta que pode ser representada pelo diagrama de blocos abaixo, em que r(t) e y(t) são a entrada e saída dessa planta, respectivamente.
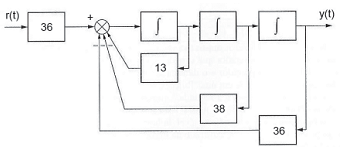
Após análise do diagrama, conclui-se que a função de
transferência do sistema é representada por
Considere o sinal a seguir:
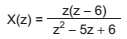
A inversa Z desse sinal é:
Parte de um sistema industrial possui a função de transferência mostrada abaixo.
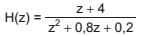
O sistema representado pela função de transferência é um sistema BIBO
Dados:
√2 = 1,4
√10 = 3,16
A função de transferência de um circuito é dada por  .
.
Considere o sistema de controle em malha fechada e a tabela de Routh-Hurwitz correspondente mostrados a seguir.
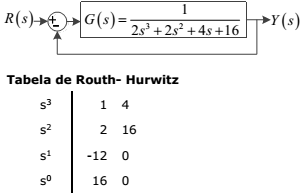
Considerando o sistema e a tabela apresentados
acima, assinale a afirmação verdadeira.

A respeito do elemento sensor e do elemento de condicionamento de sinal, normalmente necessários em um sistema de controle digital, julgue o item subsequente.
Caso o elemento sensor seja resistivo, o elemento de
condicionamento pode ser um circuito do tipo ponte de
deflexão resistiva.
Um circuito de condicionamento do tipo ponte de deflexão reativa necessita de alimentação CC (de corrente contínua).