Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 217 questões

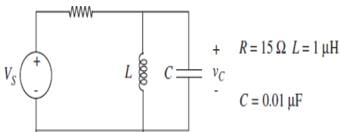
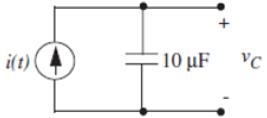
Considerando que, no circuito apresentado, a chave esteve na posição original por muito tempo e, em t = 0, muda de posição conforme ilustrado, julgue o item que se segue.
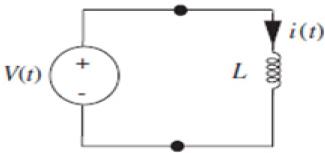
Se a fonte dependente for substituída por um indutor de 2,5 H,
o fator de amortecimento do circuito será inferior a ½.
Considerando que, no circuito apresentado, a chave esteve na posição original por muito tempo e, em t = 0, muda de posição conforme ilustrado, julgue o item que se segue.
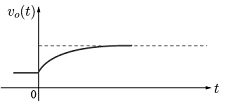
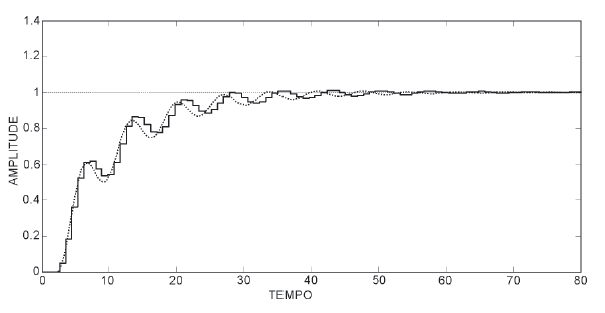
A figura a seguir ilustra de forma correta o comportamento da tensão no capacitor do circuito.
Considerando que, no circuito apresentado, a chave esteve na posição original por muito tempo e, em t = 0, muda de posição conforme ilustrado, julgue o item que se segue.
No instante de tempo imediatamente anterior à mudança de
posição da chave, a corrente no indutor era igual a 1 mA.
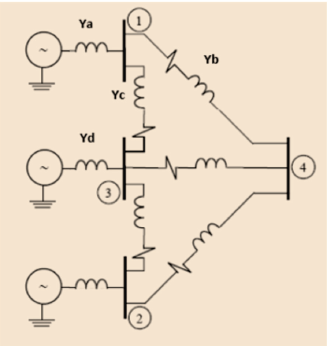
As expressões que traduzem os elementos da Y22 e Y14 da matriz de admitância nodal, respectivamente, são:
Se um sistema linear de segunda ordem tem coeficiente de amortecimento maior que 1, esse sistema é denominado sobreamortecido.
A figura a seguir apresenta um sistema de controle representado pelo diagrama de blocos.
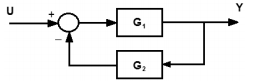
Esse sistema pode ser substituído por uma única função de
transferência, conforme
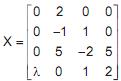
Sendo o determinante da matriz X igual a -30, qual é o valor do parâmetro λ?
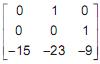 Os autovalores dessa matriz são as raízes do seu polinômio característico, obtidos da relação det(λI - A) = 0.
Os autovalores dessa matriz são as raízes do seu polinômio característico, obtidos da relação det(λI - A) = 0.Considerando-se que um de seus autovalores vale -1, a soma de todos os seus autovalores é igual a
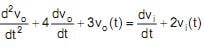
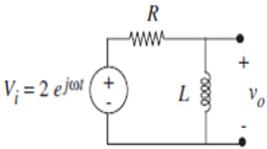
onde
• vi (t)é o sinal da fonte de tensão na entrada do circuito, dado por vi (t) = 3e-2t , para t ≥ 0, e nulo para t<0.
• v0 (t) é o sinal medido como tensão na saída do circuito.
Com base nos dados apresentados e considerando, no modelo matemático, as condições iniciais nulas, a expressão do sinal de saída para t ≥ 0 é
Situações
I. Subamortecido
II. Criticamente Amortecido
III. Sobreamortecido
Características
1. Dois polos reais e distintos. O sistema se aproxima do comportamento de um sistema de 1a ordem com o aumento do fator de amortecimento.
2. Dois polos reais e iguais. O sistema passa a não ter mais oscilações a partir do valor de fator de amortecimento igual à unidade.
3. O sistema apresenta oscilações e possui dois polos complexos conjugados.
A associação correta das situações com suas respectivas características é
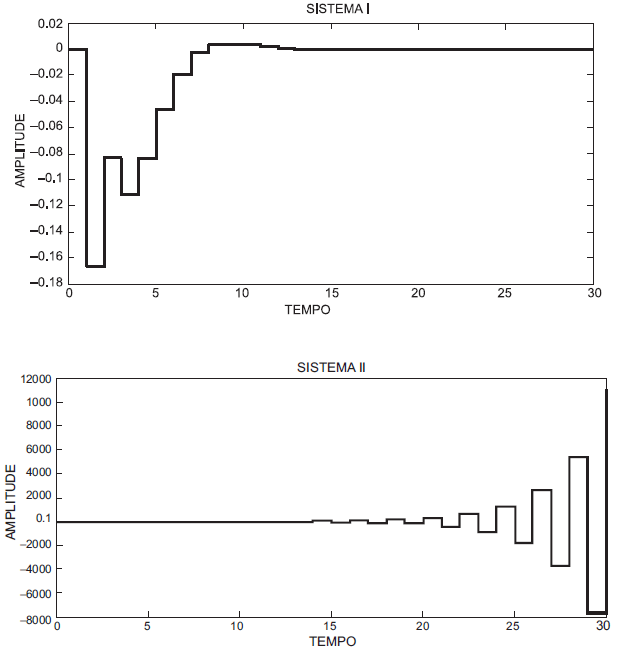
I. O sistema é estável se tiver qualquer polo na parte real positiva.
II. O sistema é estável se, quando sujeito a uma entrada impulso, a saída tende a zero à medida que o tempo tende ao infinito.
III. O sistema é criticamente estável se qualquer polo tiver a parte real nula.
Assinale - se
 e pode ser representado no espaço de estados pelas seguintes equações matriciais:
e pode ser representado no espaço de estados pelas seguintes equações matriciais: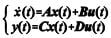
Com base nessas informações, julgue os itens subsecutivos.
A forma canônica controlável da matriz A é dada por


O sistema representado pela função de transferência G(s) é de segunda ordem.