Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 217 questões
Considere um processo industrial, caracterizado pela função de transferência abaixo.
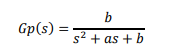
Em relação ao desempenho deste processo, pode-se afirmar que Gp(s):
Um técnico dispõe de sistema linear, invariante no tempo com característica puramente resistiva. O mesmo é encarregado de obter a característica da tensão de saída sobre uma carga resistiva em função da tensão aplicada na entrada efetuando medições para dez valores da tensão de entrada com dez valores de resistência de carga para cada valor da tensão de entrada. Sem tempo para executar essa tarefa, o técnico optou por estabelecer um modelo equivalente para o sistema usando o seguinte procedimento: Aplicou na entrada uma fonte padrão de 10,0 V, obtendo na saída uma tensão de 9,00 V com a saída em circuito aberto. Conectando um resistor padrão de 8,00 Ω à saída, obteve uma tensão na carga de 8,00 V. Com base no modelo obtido pode-se afirmar:
I. Se a tensão aplicada à entrada for de 20,0 V e a resistência de carga for de 8,00 Ω, a tensão de saída é de 16,0 V.
II. Se a tensão aplicada à entrada for de 10,0 V e a resistência de carga for de 4,00 Ω, a tensão de saída é de 4,00 V.
III. Se a tensão aplicada à entrada for de 15,0 V e a resistência de carga for de 2,00 Ω, a tensão de saída é de 9,00 V.
Considerando as afirmativas acima, assinale a alternativa correta.
Um sistema possui resposta ao impulso igual a 

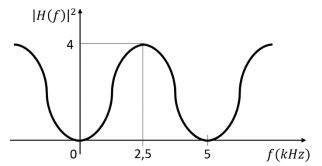
Sabendo-se que H(ƒ) é obtido a partir da transformada de Fourier de h(t) e que |H(ƒ)| 2 é apresentada no gráfico acima, o valor do atraso T, em ms, é igual a

Nele, a entrada é uma onda quadrada de frequência 1 kHz, sendo que em 50% do tempo ela está a 6 V e em 50% do tempo, a 2 V. A saída indicada será a superposição de senoides de apenas frequências iguais a: Obs.: considera-se que existe uma componente senoidal se sua amplitude, após uma decomposição de Fourier, é não nula.
A Figura a seguir mostra um sinal temporal v(t) que representa um pulso retangular.

A Transformada de Fourier (TF) aplicada ao sinal é obtida pela integral:

O resultado dessa integral será uma função complexa V(ω), que tem como argumento a frequência angular, representada pela variável ω[rad/s].
Considerando-se os dados da Figura, a expressão dessa
Transformada de Fourier é
O gráfico mostrado na Figura a seguir apresenta a resposta ao degrau de um sistema de 2ª ordem. Esse sistema é representado pela seguinte Função de Transferência entre entrada e saída, onde o parâmetro B é desconhecido:

Com base nos dados da Figura, os valores do parâmetro
B e os da Razão de Amortecimento do sistema são, respectivamente,
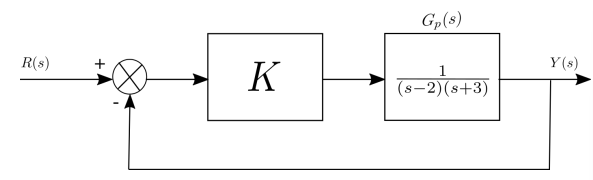
O diagrama em blocos da Figura mostra um sistema linear, cujos blocos estão representados por Funções de Transferência em Laplace, configurando uma estrutura de Controle e Servomecanismos. A estrutura encontra-se em malha fechada, utilizando uma realimentação negativa de saída.

Para que o sistema, em malha fechada, tenha uma razão
de amortecimento de 0,5, o valor do ganho K será
Considere o sinal temporal de tensão causal e não periódico dado por x(t) = Ae- τ/t , onde τ é uma constante de
tempo. Seu espectro de frequência é  ,
obtido a partir da transformada de Fourier do sinal x(t).
,
obtido a partir da transformada de Fourier do sinal x(t).
A expressão da frequência, em Hertz, no ponto de meia potência do espectro |X(f)| é igual a
Um determinado sistema dinâmico monovariável apresenta o seguinte modelo, sob a forma de espaço de estado:

em que u representa o sinal de entrada, y, o sinal de saída, e x, o vetor de estados.
Qual deverá ser o modelo desse sistema, sob a forma de
função de transferência G(s) = Y(s)/U(s)?

Um engenheiro deseja modificar o comportamento dinâmico de um sistema modelado por meio de função de transferência. Para isso, realiza uma realimentação negativa da saída, a partir do ajuste do ganho K > 0, conforme apresentado na Figura acima.
Analisando-se o diagrama do Lugar das Raízes (root locus), verifica-se que o sistema em malha fechada será

Na Figura acima encontra-se ilustrado um sistema discreto, modelado por meio da função de transferência de 3ª ordem apresentada.
No que se refere à posição dos polos e à estabilidade,
esse sistema é

Na Figura (X), encontra-se um circuito alimentado por uma fonte senoidal de amplitude Vi . Aplicando-se o teorema de Thevenin na parte do circuito dentro do retângulo tracejado, é possível substituir esse circuito por uma fonte de tensão senoidal de amplitude VTh em série com um resistor RTh, conforme a Figura (Y).
Nesse caso, qual será a resistência, em ohms, de RTh?

Na Figura acima, encontra-se apresentado um circuito alimentado por uma fonte de tensão DC e cujos componentes são considerados ideais. Suponha, inicialmente, que o capacitor esteja descarregado e que a chave S esteja aberta. Em t = 0, a chave S é fechada.
Considerando o tempo t em segundos, qual deverá ser a expressão da tensão v2 (t), em volts, para t ≥ 0?

O circuito ilustrado na Figura acima contém um amplificador operacional, considerado ideal.
Se no instante t = 0 for aplicado o sinal de tensão
senoidal Vi
(t) = 3 sen(ωt) na entrada desse circuito, com
ω = 1.000 rad/s, qual deverá ser a resposta Vo
(t) do circuito em regime permanente?

A Figura acima apresenta uma representação no domínio da frequência de um circuito composto por uma fonte de tensão, uma fonte de corrente, dois resistores, um indutor e um capacitor, todos considerados ideais.
A expressão que fornece o valor da tensão V1
, em volts,
é dada por
I. a quantidade de energia elétrica consumida pela lâmpada num período de 10 horas diárias num mês de 30 dias; II. o valor a ser pago por esse consumo, sabendo que a empresa de energia elétrica cobra a tarifa de R$1,20 por kWh mais um imposto de 10%.
Os valores indicados em (I) e em (II) são, respectivamente,
No circuito abaixo são conhecidos os valores de I1, I2 e I4.
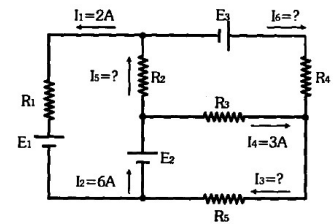
Por meio da Lei de Kirchoff para correntes, verifica-se que os
valores de I3, I5 e I6 são, respectivamente,
Sua representação é dada pelas equações matriciais:
 (t) = AX(t) + Bu(t) e y(t) = CX(t)
(t) = AX(t) + Bu(t) e y(t) = CX(t) onde
 (t) corresponde à 1a
derivada do vetor de estados
em relação ao tempo, e os componentes são:
(t) corresponde à 1a
derivada do vetor de estados
em relação ao tempo, e os componentes são:
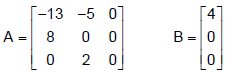 C = [0 1 2]
C = [0 1 2]Por ser um sistema de terceira ordem, os valores dos seus três polos são: