Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 217 questões
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405640
Engenharia Eletrônica

No diagrama de blocos mostrado na figura acima, em que G1(s) = s+1, G2(s) = s2 , G3(s) = s, a entrada U(s) é nula no instante inicial. Julgue os próximos itens, a respeito da função de transferência G(s) = Y(s)/U(s).
O sistema representado pela função G(s) é estável.
O sistema representado pela função G(s) é estável.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404917
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Se os sinais 1 e 2 ilustrados abaixo, de mesma amplitude pico-a-pico, fase e período, forem processados por um osciloscópio digital de 1 GHz de largura de faixa e canais de aquisição com acoplamento CC, então as suas transformadas rápidas de Fourier (FFT) serão iguais.
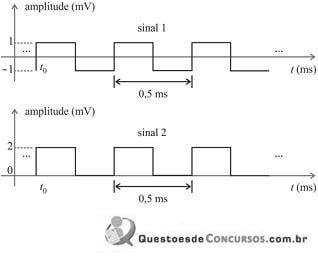
Se os sinais 1 e 2 ilustrados abaixo, de mesma amplitude pico-a-pico, fase e período, forem processados por um osciloscópio digital de 1 GHz de largura de faixa e canais de aquisição com acoplamento CC, então as suas transformadas rápidas de Fourier (FFT) serão iguais.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404916
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Considere o gráfico abaixo, que representa a resposta impulsiva de um sistema dinâmico linear de segunda ordem em uma janela temporal de cinco constantes de tempo. Nessa situação, o sistema pode ser corretamente caracterizado por um par de polos complexos conjugados com valores aproximados de -10 + j50p e -10 - j50p.
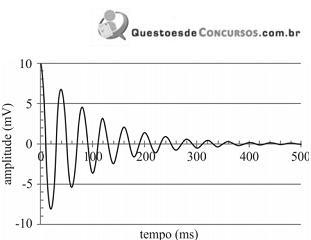
Considere o gráfico abaixo, que representa a resposta impulsiva de um sistema dinâmico linear de segunda ordem em uma janela temporal de cinco constantes de tempo. Nessa situação, o sistema pode ser corretamente caracterizado por um par de polos complexos conjugados com valores aproximados de -10 + j50p e -10 - j50p.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404915
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.
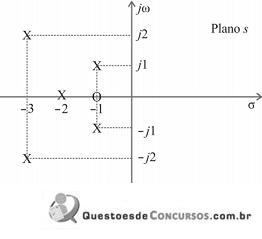
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
TRT - 10ª REGIÃO (DF e TO)
Prova:
CESPE - 2013 - TRT - 10ª REGIÃO (DF e TO) - Analista Judiciário - Engenharia |
Q801263
Engenharia Eletrônica
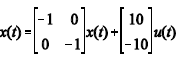
Considerando que, em condições de contorno iniciais nulas, um sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 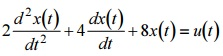 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
Se o sinal de entrada for do tipo função degrau, a resposta
desse sistema, em regime permanente, será sempre nula.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE - 2013 - Telebras - Especialista em Gestão de Telecomunicações - Engenheiro Eletricista |
Q564549
Engenharia Eletrônica

Assumindo-se K = 1, uma possível representação do sistema
na forma de variáveis de estado é a descrita pelo sistema
matricial abaixo, em que x(t) representa os estados; u(t) o sinal
de entrada; e y(t) o sinal de saída.
y(t) = [-1 1] x(t)
y(t) = [-1 1] x(t)
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE - 2013 - Telebras - Especialista em Gestão de Telecomunicações - Engenheiro Eletricista |
Q564546
Engenharia Eletrônica
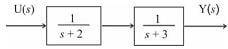
O diagrama de blocos acima representa a modelagem de uma planta controlada por um controlador do tipo proporcional que apresenta como entrada um sinal de erro obtido a partir da diferença entre o sinal de entrada U(s) e a saída Y(s). A partir dessas informações, julgue o item.
Na situação em que K = 0,1, o sistema será subamortecido.
Na situação em que K = 0,1, o sistema será subamortecido.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475270
Engenharia Eletrônica
A relação no domínio do tempo entre o sinal de entrada u(t) e de saída y(t) de uma planta industrial é representada pela equação diferencial de segunda ordem 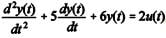 para t ≥ 0
para t ≥ 0
Tendo como base essas informações, julgue o próximo item.
A figura abaixo representa corretamente uma das formas possíveis para a relação entre entrada e saída dessa planta na forma de diagrama em bloco, em que s é a variável da transformada de Laplace.
para t ≥ 0Tendo como base essas informações, julgue o próximo item.
A figura abaixo representa corretamente uma das formas possíveis para a relação entre entrada e saída dessa planta na forma de diagrama em bloco, em que s é a variável da transformada de Laplace.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475269
Engenharia Eletrônica
A relação no domínio do tempo entre o sinal de entrada u(t) e de saída y(t) de uma planta industrial é representada pela equação diferencial de segunda ordem para t ≥ 0
Tendo como base essas informações, julgue o próximo item.
Caso a entrada seja dada por u(t) = 5 sen(t), para t ≥ 0, então a amplitude da saída em regime permanente será igual a 2.
para t ≥ 0Tendo como base essas informações, julgue o próximo item.
Caso a entrada seja dada por u(t) = 5 sen(t), para t ≥ 0, então a amplitude da saída em regime permanente será igual a 2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475268
Engenharia Eletrônica
A relação no domínio do tempo entre o sinal de entrada u(t) e de saída y(t) de uma planta industrial é representada pela equação diferencial de segunda ordem para t ≥ 0
Tendo como base essas informações, julgue o próximo item.
Considerando o vetor de estados x(t) = [x1(t) x2(t)] T , uma das possíveis maneiras de representar a planta industrial na forma de variáveis de estados é apresentada abaixo.

para t ≥ 0Tendo como base essas informações, julgue o próximo item.
Considerando o vetor de estados x(t) = [x1(t) x2(t)] T , uma das possíveis maneiras de representar a planta industrial na forma de variáveis de estados é apresentada abaixo.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458461
Engenharia Eletrônica
Acerca da estabilidade de sistemas dinâmicos e suas características nos domínios do tempo e da frequência, julgue os itens a seguir.
Considere dois sistemas dinâmicos lineares cujos polos e zeros de suas funções de transferência em malha fechada são ilustrados na figura abaixo. Nessa situação, é correto afirmar que ambos os sistemas são estáveis, as constantes de tempo do sistema 1 são menores que as constantes de tempo do sistema 2, e a frequência natural do sistema 1 é maior que a frequência natural do sistema 2.
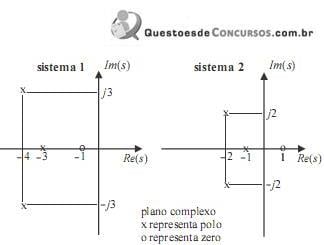
Considere dois sistemas dinâmicos lineares cujos polos e zeros de suas funções de transferência em malha fechada são ilustrados na figura abaixo. Nessa situação, é correto afirmar que ambos os sistemas são estáveis, as constantes de tempo do sistema 1 são menores que as constantes de tempo do sistema 2, e a frequência natural do sistema 1 é maior que a frequência natural do sistema 2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458460
Engenharia Eletrônica
Acerca da estabilidade de sistemas dinâmicos e suas características nos domínios do tempo e da frequência, julgue os itens a seguir.
Considere que a tensão elétrica nos terminais de um elemento de um circuito linear de primeira ordem seja dada por v(t) = 6 - 2e-2t V, com t em segundos, em que t = 0 corresponde ao instante em que a chave do circuito é aberta. Nessa situação, a tensão v(t) se estabiliza depois de transcorrido 1 segundo desde a abertura da chave.
Considere que a tensão elétrica nos terminais de um elemento de um circuito linear de primeira ordem seja dada por v(t) = 6 - 2e-2t V, com t em segundos, em que t = 0 corresponde ao instante em que a chave do circuito é aberta. Nessa situação, a tensão v(t) se estabiliza depois de transcorrido 1 segundo desde a abertura da chave.
Ano: 2013
Banca:
FGV
Órgão:
TJ-AM
Prova:
FGV - 2013 - TJ-AM - Analista Judiciário - Engenharia Elétrica |
Q445250
Engenharia Eletrônica
Um sistema tido como linear é aquele que atende ao princípio da sobreposição de efeitos. Sob o ponto de vista matemático, um sistema é linear, quando pode ser modelado por meio de equações lineares. As variáveis que permitem determinar ou conhecer o “estado” do circuito é dado o nome de variáveis de estado.
Assinale a alternativa que corresponde a uma variável de estado de um sistema descrito pela equação Y’’’ + 3 y’’ + 5 y’ = 2 u.
Assinale a alternativa que corresponde a uma variável de estado de um sistema descrito pela equação Y’’’ + 3 y’’ + 5 y’ = 2 u.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397821
Engenharia Eletrônica
A seguir, é mostrada a representação de um sistema linear contínuo no tempo em que
 .
.
O referido sistema é de quarta ordem.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397820
Engenharia Eletrônica
A seguir, é mostrada a representação de um sistema linear contínuo no tempo em que
.Para que o sistema em análise seja observável, a matriz de observabilidade deverá ter posto igual a 3.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397819
Engenharia Eletrônica
A seguir, é mostrada a representação de um sistema linear contínuo no tempo em que
.O sistema em questão possui um autovalor igual a 3.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397817
Engenharia Eletrônica
Julgue o item a seguir, referente à análise de sistemas lineares contínuos no domínio da frequência.
A largura de banda de um sistema linear é definida pela faixa de valores de frequências na qual a razão de variação de magnitude ultrapassa o valor de 3 dB.
A largura de banda de um sistema linear é definida pela faixa de valores de frequências na qual a razão de variação de magnitude ultrapassa o valor de 3 dB.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397816
Engenharia Eletrônica
Julgue o item a seguir, referente à análise de sistemas lineares
contínuos no domínio da frequência.
O pico de ressonância representa o valor máximo da magnitude da resposta em frequência de um sistema linear em malha- fechada.
O pico de ressonância representa o valor máximo da magnitude da resposta em frequência de um sistema linear em malha- fechada.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MS
Prova:
CESPE / CEBRASPE - 2013 - MS - Engenheiro Eletricista |
Q331318
Engenharia Eletrônica
Texto associado
Considerando o sistema linear discret o representado pela equação de diferenças y [n] = 3y [n-1] + 2x [n] - 4x [n-2], em que x [n] é o sinal de entrada e y [n] é o sinal de saída, julgue os itens subsequentes.
A função de transferência do referido sistema é  .
.
.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MS
Prova:
CESPE / CEBRASPE - 2013 - MS - Engenheiro Eletricista |
Q331317
Engenharia Eletrônica
Texto associado
Considerando o sistema linear discret o representado pela equação de diferenças y [n] = 3y [n-1] + 2x [n] - 4x [n-2], em que x [n] é o sinal de entrada e y [n] é o sinal de saída, julgue os itens subsequentes.
Trata-se de um sistema IIR (infinite impulse response), causal e instável.