Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 217 questões

Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.

Considere as informações a seguir para responder à questão.
O controle de atitude de um satélite em órbita consiste em ajustar, automaticamente, o ângulo de seu eixo, de modo a direcionar sua antena para a região desejada na superfície da Terra. O modelo simplificado desse sistema consta de um sinal de entrada, que é o torque τ(t), e de um sinal de saída, que é o ângulo θ(t). Considerando o vetor de estado X(t)=  definido com x1(t) =
definido com x1(t) =  (t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
(t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
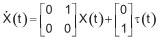 e y(t) = [1,0] x(t)
e y(t) = [1,0] x(t)
Aplicando uma realimentação de estado, com a lei de controle dada por τ(t)= - KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é
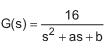
G(s) = K
s² + as + b
Esse sistema opera com razão de amortecimento 0,7 e frequência natural não amortecida de 15 rad/s. Quando alimentado por um degrau unitário em sua entrada, a saída, em regime permanente, atinge o valor 0,4. Os valores de a e K, respectivamente, são
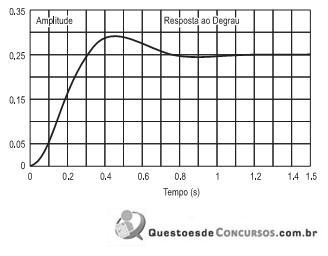
O gráfico da figura acima corresponde à resposta ao degrau unitário de um sistema de 2ª ordem, cuja função de transferência é
 . Com base nos dados da figura, o valor da Frequência Natural Não Amortecida é
. Com base nos dados da figura, o valor da Frequência Natural Não Amortecida é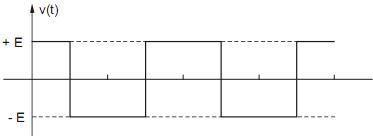
A série de Fourier desse sinal é caracterizada por:
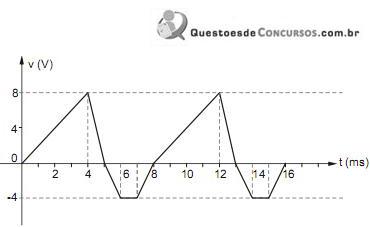
A tensão média vale:


A função de transferência que liga a saída Y(s) à entrada X(s) é

Considerando a figura acima, que ilustra um sistema linear e
invariante no tempo, com resposta ao impulso h(t), entrada x(t) e
saída y(t), julgue os itens a seguir.
Considerando a figura acima, que ilustra um sistema linear e
invariante no tempo, com resposta ao impulso h(t), entrada x(t) e
saída y(t), julgue os itens a seguir.

eletrônica digital, julgue os próximos itens.
 e outra em onda completa
e outra em onda completa  Nessas condições, o valor médio de S1 será igual à metade do valor médio de
Nessas condições, o valor médio de S1 será igual à metade do valor médio de  ainda que os valores RMS das duas formas de onda sejam iguais.
ainda que os valores RMS das duas formas de onda sejam iguais.digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
Um sistema linear é modelado pelas seguintes equações

em que as constantes  e as variáveis físicas
e as variáveis físicas  .
.
A entrada do sistema é u(t) e a saída medida é y(t).
 desse sistema é:
desse sistema é:
 ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
 n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.