Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 217 questões
Figura 12
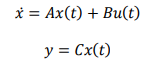
 x ∈ Rn, u ∈ Rm, y ∈ Rp
x ∈ Rn, u ∈ Rm, y ∈ RpSendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
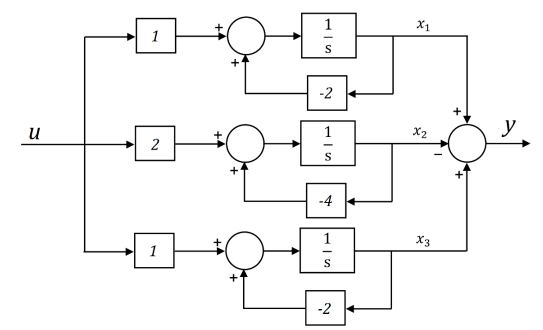
Figura 11
Considere o sistema massa-mola-amortecido (Figura 10) a seguir:
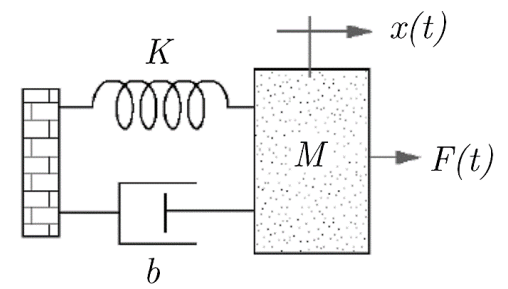
Figura 10
Os sinais de entrada e de saída do sistema são dados por F(t) e x(t), respectivamente. Além disso, definem-se as variáveis de estado como x1(t) = x(t) e x2(t) = ẋ(t). Com base nessas informações, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
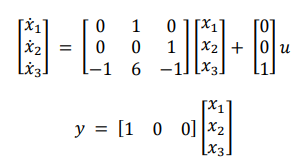
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
Considere o sistema abaixo (Figura 8) com retroalimentação unitária:
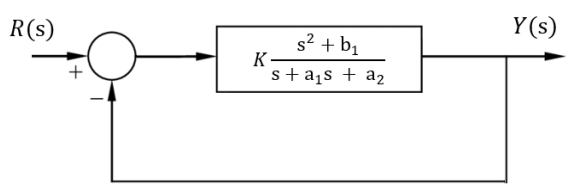
Figura 8
Dado o seu lugar das raízes mostrado na Figura 9 abaixo, assinale a alternativa correta.
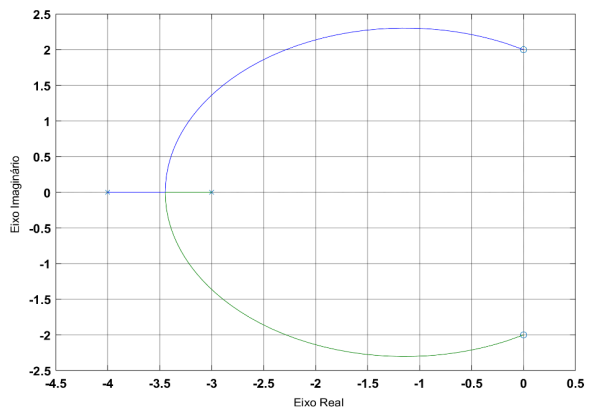
Figura 9
I. Se e somente se todos os polos estiverem dentro do círculo unitário (centrado na origem do plano Z), o sistema é assintoticamente estável.
II. O sistema é instável se e somente se existirem polos de multiplicidade maior que um sobre o círculo unitário.
III. O sistema é marginalmente instável se polos não repetidos estiverem sobre o círculo unitário e não existirem polos fora do círculo unitário.
y(K) = 0,3u(K − 1) + 0,3u(K − 2) + 0,9y(K − 1) − 0,2y(K − 2)
Assinale a alternativa que corresponde ao ganho estático (ou ganho DC) desse sistema.
I. Para um sistema estável linear invariante no tempo e sujeito a uma entrada senoidal em regime permanente, a saída será também senoidal e terá a mesma amplitude que a entrada, porém com frequências diferentes.
II. A resposta em frequência do sistema é definida a partir do ganho e da defasagem em função da frequência.
III. A Margem de Ganho (MG) é o quanto se pode reduzir o ganho de um sistema antes que a instabilidade ocorra se o ângulo de fase for constante em 180°.
IV. A Margem de Fase (MF) é o quanto se pode alterar o ângulo de fase antes que a instabilidade ocorra com ganho mantido unitário.
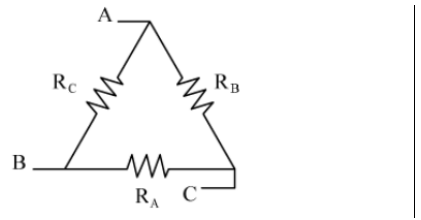 Dados: RA = 40 Ω, RB = 15 Ω, RC = 20 Ω Figura 1
Dados: RA = 40 Ω, RB = 15 Ω, RC = 20 Ω Figura 1 O circuito equivalente em Y é apresentado na Figura 2 a seguir:
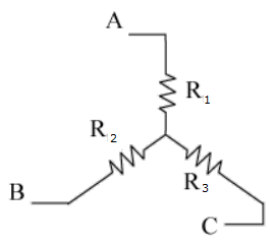
Figura 2
Assinale a alternativa que apresenta os valores para R1, R2 e R3 no circuito equivalente em Y.
Um engenheiro, com o intuito de implementar um sistema de controle discreto, identificou, por meio de algoritmo recursivo, o modelo matemático de uma planta industrial, caracterizado pela seguinte equação a diferenças:

Tendo como base a equação a diferenças, analise as afirmativas abaixo.
I. A função de transferência no domínio discreto é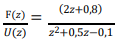
II. Este modelo possui um zero em -0,25.
III. O modelo discreto é de 2ª ordem, com atraso de transporte igual a ???? = 2.
IV. O ganho estático (DC – Direct Current ) desse processo é igual a 2.
Estão corretas as afirmativas:
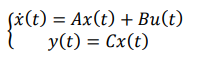
Considere o sistema abaixo, representado em espaço de estados.
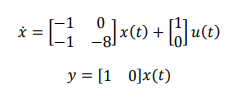
Um engenheiro, verificando (por meio da análise de controlabilidade) que o sistema é totalmente controlável, projetou um controlador por realimentação de estados, alocando os autovalores do sistema (polos de malha fechada) em -3 e -4. Sendo assim, qual o vetor de ganho k = [k1 k2] alcançado pelo engenheiro projetista?
Considere o circuito RLC da figura abaixo.
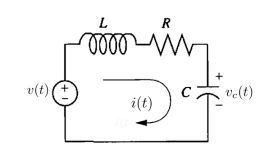
Considerando os sinais v(t) e vc(t) como sendo os sinais de entrada e saída do sistema, respectivamente, e definindo-se as variáveis de estados como x1 = i(t) e x2 = vc(t), temse as matrizes do modelo matemático representado em Espaço de Estados