Questões de Concurso
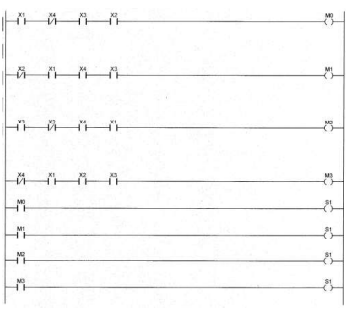
Sobre modelagem de sistemas dinâmicos em engenharia de automação
Foram encontradas 63 questões
Se G (s) =
 , é correto afirmar que
, é correto afirmar que Considere os circuitos 1 e 2 representados a seguir:
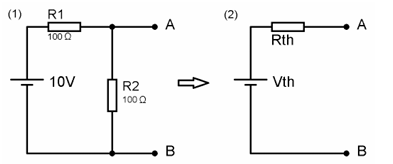
Calcule os parâmetros de equivalência de Thévenin do circuito 2, tensão e resistência de Thévenin (Vth e Rth), que uma carga perceberia se conectada entre os pontos A e B.
A análise de circuitos elétricos e eletrônicos utiliza de diversas ferramentas para a solução de problemas. Dentre elas há um teorema que permite substituir um circuito linear de dois terminais por um circuito simplificado equivalente que se reduz a uma fonte de corrente e um resistor em paralelo.
O teorema descrito é conhecido por
Observe o circuito resistivo a seguir.
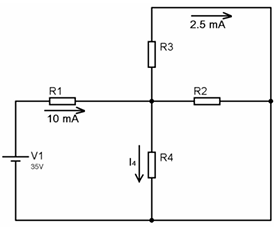
As correntes que atravessam os resistores R1 e R3 são conhecidas e estão indicadas no circuito.
Sabendo que R2 = 10R1 e R2 = R3, determine a corrente elétrica I4 que atravessa o resistor R4.
O módulo da corrente que passa pelo resistor R no instante imediatamente após a abertura da chave e 6s após a abertura, respectivamente, são, aproximadamente
Observe a seguinte equação.

Para o sistema dinâmico mostrado na equação acima, assinale a alternativa que representa uma
realização de estado válida para quando o vetor de estado é definido como: 
Observe a equação abaixo.

Em relação ao sistema dinâmico mostrado na equação, assinale V (verdadeiro) ou F (falso) nas afirmativas a seguir.
(__) É assintoticamente estável.
(__) Sua resposta ao degrau é sobreamortecida.
(__) É de fase mínima.
(__) Não é causal.
A sequência correta é
Considere o sistema discreto no tempo descrito por:
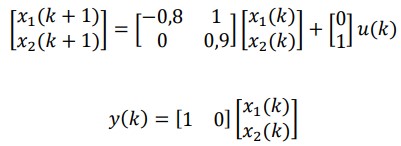
Sobre esse sistema, é correto afirmar que é:
A Figura abaixo ilustra o plano de Argand-Gauss onde os pólos A, B e C (assinalados com X) se encontram representados. Esses polos são dados pela expressão s = σ + jω.
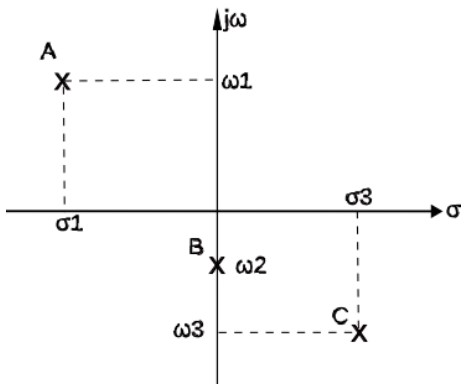
Ao se realizar a Transformada Z, em que z = eTs e T é o período de amostragem, o mapeamento desses polos no novo plano complexo é tal que:
O gráfico abaixo ilustra um degrau unitário u(t).
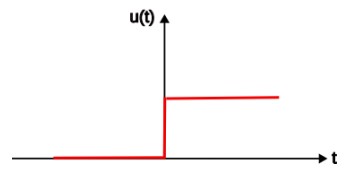
Modificações nessa função resultam em novos sinais, representados a seguir:
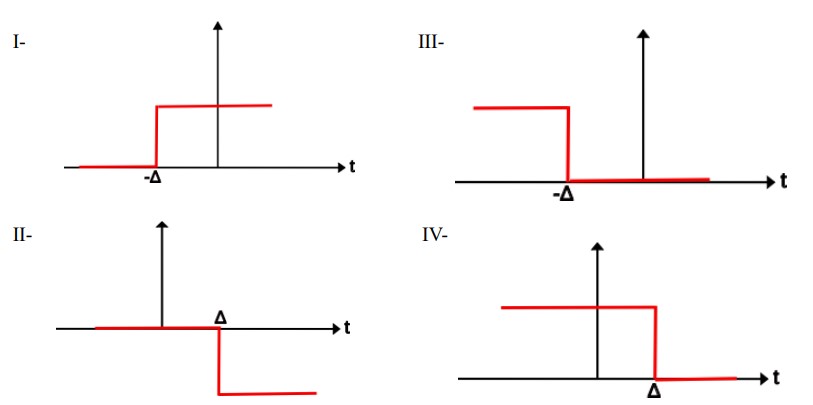
Marque a opção correta: