Questões de Concurso
Sobre modelagem de sistemas dinâmicos em engenharia de automação
Foram encontradas 61 questões
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113267
Engenharia de Automação
Um sistema dinâmico em malha fechada pode ser modelado sob a forma de espaço de estado através das seguintes equações:
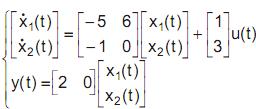
As posições dos pólos no plano s da função de transferência deste sistema são
As posições dos pólos no plano s da função de transferência deste sistema são