Questões de Concurso
Sobre modelagem de sistemas dinâmicos em engenharia de automação
Foram encontradas 61 questões
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081652
Engenharia de Automação
Qual sistema definido pelas equações em espaço de estados a seguir é instável?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081651
Engenharia de Automação
Qual sistema definido pelas equações em espaço de estados a seguir é instável?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081648
Engenharia de Automação
Considere o gráfico do lugar das raízes associado ao
sistema de controle, conforme figuras a seguir.
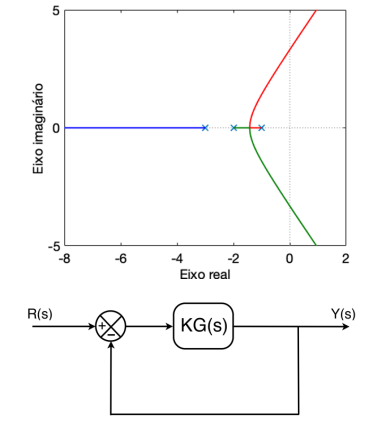
Qual afirmação está INCORRETA?
Qual afirmação está INCORRETA?
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Energia |
Q4050581
Engenharia de Automação
Seja o sistema fluídico dinâmico de Lorenz apresentado
pela equação a seguir; marque V para as afirmativas verdadeiras e F para as falsas.
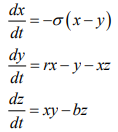
( ) X é proporcional à intensidade da convecção. X = 0 implica que não há movimento convectivo, ou seja, o calor é transportado apenas por condução.
( ) Y é inversamente proporcional à diferença de temperatura entre as correntes de fluido ascendente e descendente.
( ) Z é proporcional à distorção do perfil de temperatura vertical, relativamente a um perfil linear. Para Z = 0, a temperatura decresce linearmente.
( ) O conjunto de equações diferenciais apresentado é linear.
( ) O sistema pode ser representado por espaço de estados e observa-se, pelas equações, resposta natural mais forçada.
A sequência está correta em
( ) X é proporcional à intensidade da convecção. X = 0 implica que não há movimento convectivo, ou seja, o calor é transportado apenas por condução.
( ) Y é inversamente proporcional à diferença de temperatura entre as correntes de fluido ascendente e descendente.
( ) Z é proporcional à distorção do perfil de temperatura vertical, relativamente a um perfil linear. Para Z = 0, a temperatura decresce linearmente.
( ) O conjunto de equações diferenciais apresentado é linear.
( ) O sistema pode ser representado por espaço de estados e observa-se, pelas equações, resposta natural mais forçada.
A sequência está correta em
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050443
Engenharia de Automação
Segundo Katsuhiko Ogata, “a tendência moderna nos sistemas de engenharia é aumentar sua complexidade, principalmente em virtude da necessidade de realizar tarefas
complexas e de alta precisão”. Sobre a análise e projeto de
sistemas de controle no espaço de estados, assinale a
afirmativa correta.
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050440
Engenharia de Automação
Uma vantagem do método de controle quadrático é fornecer um modo sistemático de cálculo da matriz de ganho de
controle por realimentação de estado. Sobre os sistemas
reguladores ótimos, assinale a afirmativa INCORRETA.
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050425
Engenharia de Automação
Considere o sensor de abalo estrutural sobre uma carcaça X, medido por Y, dado pela imagem.
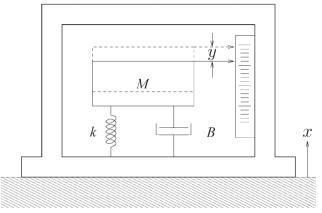
A função de transferência que exprime a relação Y(s) por X(s) é dada por:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103247
Engenharia de Automação
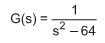
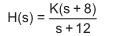
Considere um sistema cuja função de transferência seja
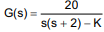 .
Para que esse sistema seja estável, o valor de K deverá ser:
.
Para que esse sistema seja estável, o valor de K deverá ser:
.
Para que esse sistema seja estável, o valor de K deverá ser:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103246
Engenharia de Automação
Entre os diversos temas presentes na teoria de controle
de processos, garantir a estabilidade do sistema
controlado apresenta fundamental importância. Nesse
cenário, o critério de estabilidade BIBO é amplamente
utilizado.
Considerando esse critério, assinale a alternativa que
apresenta a função de transferência de um sistema
estável.
Ano: 2017
Banca:
FADESP
Órgão:
COSANPA
Prova:
FADESP - 2017 - COSANPA - Técnico Industrial - Automação e Controle |
Q2754178
Engenharia de Automação
Considere as afirmações a seguir, sobre um sistema de controle de processo por malha fechada:
I – O sinal de saída referente a um dado processo é mensurado e comparado com o sinal de entrada, possibilitando, assim, um ajuste do controle, tornando o processo mais estável.
II – O controle de processo por malha fechada não depende do sinal de saída do processo.
III – O sinal de entrada é comparado com um valor de referência, aumentando, assim, a estabilidade do sistema.
Está correto o que se afirma em
Ano: 2012
Banca:
COPESE - UFT
Órgão:
Transpetro
Prova:
COPESE - UFT - 2012 - DPE-TO - Analista em Gestão Especializado - Biblioteconomia |
Q272917
Engenharia de Automação
As figuras 1, 2 e 3 abaixo mostram os comportamentos dinâmicos da resposta de sistemas de primeira ordem e de segunda ordem.

Analise as afirmativas a seguir acerca desses sistemas:
I - A ? gura 1 representa um sistema de 1a ordem onde o valor da resposta y(t) alcança 63,2% de seu valor final quando o tempo decorrido é igual à constante de tempo, e, após decorrido um tempo igual a quatro vezes a constante de tempo, a resposta, praticamente, alcança seu valor em estado-estacionário.
II - Nos sistemas de 1a ordem (figura 1) , para efetuar a mesma variação na saída do sistema, a mudança na entrada deve ser pequena se KP for grande (sistemas muito sensíveis) ou deve ser grande se KP for pequeno, e a figura 2 representa o mesmo sistema, porém com a existência de um tempo morto.
III - Na figura 3, a representação do sistema de 2a ordem reflete um sistema sobreamortecido onde quanto maior o fator de amortecimento mais o sistema demora a responder, sendo o valor do fator de amortecimento da curva 1 > curva 2 > curva 3.
Está correto o que se afirma em
Analise as afirmativas a seguir acerca desses sistemas:
I - A ? gura 1 representa um sistema de 1a ordem onde o valor da resposta y(t) alcança 63,2% de seu valor final quando o tempo decorrido é igual à constante de tempo, e, após decorrido um tempo igual a quatro vezes a constante de tempo, a resposta, praticamente, alcança seu valor em estado-estacionário.
II - Nos sistemas de 1a ordem (figura 1) , para efetuar a mesma variação na saída do sistema, a mudança na entrada deve ser pequena se KP for grande (sistemas muito sensíveis) ou deve ser grande se KP for pequeno, e a figura 2 representa o mesmo sistema, porém com a existência de um tempo morto.
III - Na figura 3, a representação do sistema de 2a ordem reflete um sistema sobreamortecido onde quanto maior o fator de amortecimento mais o sistema demora a responder, sendo o valor do fator de amortecimento da curva 1 > curva 2 > curva 3.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262984
Engenharia de Automação
O controle do processo de automação de uma indústria utiliza o sistema mecânico mostrado no esboço abaixo.
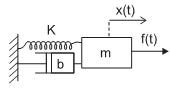
Utilizando as grandezas que aparecem na figura, e considerando que o termo forçante f(t) é a entrada, e a posição da massa x(t) é a saída, a função de transferência do sistema mecânico G(s)=x(s)/F(s) é igual a
Utilizando as grandezas que aparecem na figura, e considerando que o termo forçante f(t) é a entrada, e a posição da massa x(t) é a saída, a função de transferência do sistema mecânico G(s)=x(s)/F(s) é igual a
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262979
Engenharia de Automação
O projeto de automação de uma empresa especificou elementos de controle com mais de uma entrada, produzindo componentes de erro em estado estacionário em situações como a do sistema a seguir.
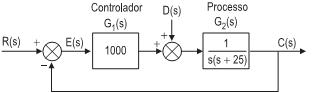
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192353
Engenharia de Automação
A equação recursiva a seguir gera a sequência causal y(n).
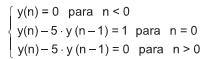
A expressão de y(n) para n ≥ 0 é
A expressão de y(n) para n ≥ 0 é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192347
Engenharia de Automação
Costuma-se aproximar a variável complexa z, usada em sistemas discretos (digitais), pela variável também complexa w para sistemas contínuos, através da relação de transformação  onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192313
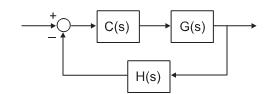
Engenharia de Automação

Considere o sistema de controle configurado na figura acima, onde a planta G(s) é INSTÁVEL, e deseja-se estabilizá-la e controlá-la com ajuda de um compensador do tipo H(s). Usa-se a técnica de cancelamento de polos da planta para reduzir a ordem do sistema. O engenheiro projetista achou, em seu cálculo, o ganho K = 125. Assim, os polos do sistema em malha fechada estarão posicionados em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192308
Engenharia de Automação
Um ruído de alta frequência, em sistemas de monitoramento ou controle, que corrompe um sinal, pode ser atenuado por um filtro
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192303
Engenharia de Automação
A Função de Transferência de Malha Aberta (FTMA) da estrutura de controle mostrada na figura acima é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192301
Engenharia de Automação
Em um sistema de controle em malha fechada, a planta é o elemento que possui a(s) variável(eis)
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267624
Engenharia de Automação
Em sistemas dinâmicos lineares e contínuos, a resposta ao impulso, também denominada função de ponderação, corresponde a uma forma de representação do sistema no domínio do tempo. Conhecendo-se a resposta impulsiva, a resposta do sistema a outros tipos de excitação pode ser corretamente obtida