Questões Militares
Para automação
Foram encontradas 167 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Analise a figura a seguir.

Analise as afirmativas a seguir a respeito dos controladores PID.
I - As regras de sintonia de Ziegler Nichols não são convenientes quando o modelo matemático do sistema é desconhecido .
II - Os controladores PID propiciam controle satisfatório para processos contínuos, porém podem não fornecer o controle ótimo em muitas situações específicas.
III- Os controladores PID não podem ser dotados de capacidade de sintonia automática (on line) .
Assinale a opção correta
Analise o circuito da figura a seguir.

Considere o sistema apresentado a seguir.
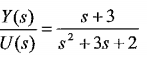
Assinale a opção que apresenta as representações no espaço
de estados sob a forma canônica controlável.
Observe a figura a seguir.

Analise a figura a seguir.

Analise o robô com pêndulo duplo da figura abaixo.

Analise o diagrama de Veitch-Karnaugh abaixo.

Analise o Grafcet da figura abaixo.

Considere o diagrama de blocos apresentado a seguir.

Analise o circuito sequencial da figura a seguir.

Considere a equação não linear apresentada a seguir.
Assinale a opção que apresenta a equação linearizada na região 5 ≤ x ≤ 7 10 ≤ y ≤ 12.