Selecionar segmento
Estude com questões de diferentes segmentos
Atenção: Isso limpará todos os campos já preenchidos no filtro!
Foram encontradas 726 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081696
Engenharia de Automação
Há vários tipos de robôs aéreos. NÃO são capazes de
realizar voo pairado aqueles baseados em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081695
Engenharia de Automação
Em um sistema de navegação autônoma, é necessário fazer a amostragem e quantização de três sinais
analógicos, obtidos a partir de sensores distintos.
Está disponível um conversor analógico-digital de
16 bits, com quatro canais e taxa de amostragem
de 50 amostras/s para leitura destes dados. A banda passante do sensor 1 é 1Hz, do sensor 2 é 5Hz e
do sensor 3 é 10Hz. Considerando-se o Teorema da
Amostragem (Nyquist/Shannon) para amostragem
dos dados, é correto afirmar que poderá ser feita a
conexão entre o conversor e o(s) sensor(es)
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081694
Engenharia de Automação
Em robótica, o problema de localização é fundamental
e consiste em determinar a posição e orientação de
um robô em relação a um referencial determinado.
Considere as seguintes afirmações sobre o problema de localização para robôs móveis.
I - Usar isoladamente as informações de encoders, medindo o giro das rodas, é suficiente para evitar erros de localização.
II - Um modelo de localização que leva em conta entradas de comando é melhor que um modelo que não incorpora tais dados.
III - O Filtro de Kalman é um algoritmo recursivo que pode ser usado para produzir uma estimativa da localização.
IV - O filtro de partículas é um método determinístico, que aponta uma localização única dentre um conjunto de possibilidades.
Está correto apenas o que se afirma em
Considere as seguintes afirmações sobre o problema de localização para robôs móveis.
I - Usar isoladamente as informações de encoders, medindo o giro das rodas, é suficiente para evitar erros de localização.
II - Um modelo de localização que leva em conta entradas de comando é melhor que um modelo que não incorpora tais dados.
III - O Filtro de Kalman é um algoritmo recursivo que pode ser usado para produzir uma estimativa da localização.
IV - O filtro de partículas é um método determinístico, que aponta uma localização única dentre um conjunto de possibilidades.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081693
Engenharia de Automação
Complete, corretamente, as lacunas do texto a seguir
sobre o problema de cinemática de manipuladores.
Considerando-se um robô industrial, o problema de cinemática direta está interessado em determinar ____________ de ____________, com base em ____________ de ____________.
A sequência que preenche as lacunas de forma correta é
Considerando-se um robô industrial, o problema de cinemática direta está interessado em determinar ____________ de ____________, com base em ____________ de ____________.
A sequência que preenche as lacunas de forma correta é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081691
Engenharia de Automação
O controlador do tipo PD é comumente usado no
controle desacoplado de manipuladores robóticos.
Com relação à função de transferência ideal desse
tipo de controlador, é correto afirmar que se introduz
no ramo direto da malha de controle um
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081689
Engenharia de Automação
Considere o seguinte algoritmo de planejamento de
caminhos:
1 - Siga em direção à posição alvo.
2 - Caso um obstáculo seja encontrado:
a. Contorne o obstáculo por completo;
b. Lembre o ponto mais próximo do alvo.
3 - Retorne usando a menor rota ao ponto mais próximo guardado e continue em direção ao alvo.
Em termos gerais, é correto afirmar que esse algoritmo representa
1 - Siga em direção à posição alvo.
2 - Caso um obstáculo seja encontrado:
a. Contorne o obstáculo por completo;
b. Lembre o ponto mais próximo do alvo.
3 - Retorne usando a menor rota ao ponto mais próximo guardado e continue em direção ao alvo.
Em termos gerais, é correto afirmar que esse algoritmo representa
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081686
Engenharia de Automação
Numere os eventos sequencialmente, do primeiro ao
último passo, usados no algoritmo de planejamento
2D utilizando grafo de visibilidade.
( ) Aplique o algoritmo A* .
( ) Determine o espaço de configurações livres.
( ) Trace linhas de visibilidade entre a configuração alvo e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre a configuração inicial e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre todos os obstáculos.
A sequência correta de eventos é
( ) Aplique o algoritmo A* .
( ) Determine o espaço de configurações livres.
( ) Trace linhas de visibilidade entre a configuração alvo e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre a configuração inicial e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre todos os obstáculos.
A sequência correta de eventos é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081685
Engenharia de Automação
Preencha corretamente as lacunas do texto a seguir
com relação às características dos sensores presentes
em robôs.
Em um manipulador industrial, o encoder óptico é um sensor usado para medir ___________, sendo qualificado como ___________. Já o laser é um sensor usado para medir ___________, sendo classificado como ___________.
Em um manipulador industrial, o encoder óptico é um sensor usado para medir ___________, sendo qualificado como ___________. Já o laser é um sensor usado para medir ___________, sendo classificado como ___________.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081684
Engenharia de Automação
Analise as asserções a seguir e a relação proposta entre elas.
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081683
Engenharia de Automação
Baseie-se no modelo do duplo integrador, comumente adotado para representação simplificada de diversos sistemas na robótica, ÿ(t) = u(t). Considerandose T como o período de amostragem, uma descrição
deste sistema no espaço de estados é dada por
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081682
Engenharia de Automação
O manipulador robótico observado na imagem a seguir representa uma variante do modelo SCARA.
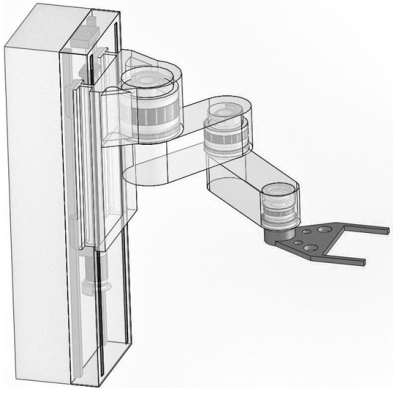
Sobre ele, é correto afirmar que possui
Sobre ele, é correto afirmar que possui
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081681
Engenharia de Automação
Considere o robô mostrado na figura a seguir, tentando alcançar um alvo atrás do obstáculo. Ele foi programado com o comportamento descrito na sequência de 1 até 6. Sensores de contato indicam a colisão
com os obstáculos.
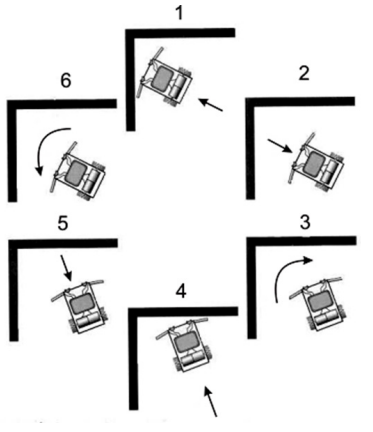
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081680
Engenharia de Automação
Uma figura de mérito para avaliar sensores industriais é a relação entre o sinal e o ruído, chamada de
SNR, do inglês Signal Noise Ratio. Calcule a relação
SNR de um sinal cujo valor de tensão eficaz é 10V e
seu ruído é 5mV, em dB.
O resultado está corretamente indicado em
O resultado está corretamente indicado em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081679
Engenharia de Automação
Com relação à estratégia de controle via torque computado NÃO é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081678
Engenharia de Automação
Uma característica importante dos robôs industriais
é sua versatilidade, a qual permite que sejam programados para executar atividades distintas.
Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081677
Engenharia de Automação
Informe se é verdadeiro (V) ou falso (F) o que se afirma sobre algoritmos de planejamento de caminho.
( ) Os algoritmos baseados em campos potenciais são suscetíveis a problemas de não convergência, devido a mínimos locais.
( ) O algoritmo Mapa de Rotas Probabilístico é considerado como capaz de resolver várias instâncias do problema de planejamento, em um mesmo ambiente.
( ) O método de planejamento baseado no Diagrama de Voronoi tem a propriedade de minimizar a distância do robô aos obstáculos.
( ) O método de planejamento baseado no Grafo de Visibilidade tem a propriedade de maximizar a distância do robô aos obstáculos.
A sequência correta é
( ) Os algoritmos baseados em campos potenciais são suscetíveis a problemas de não convergência, devido a mínimos locais.
( ) O algoritmo Mapa de Rotas Probabilístico é considerado como capaz de resolver várias instâncias do problema de planejamento, em um mesmo ambiente.
( ) O método de planejamento baseado no Diagrama de Voronoi tem a propriedade de minimizar a distância do robô aos obstáculos.
( ) O método de planejamento baseado no Grafo de Visibilidade tem a propriedade de maximizar a distância do robô aos obstáculos.
A sequência correta é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação Industrial |
Q4081676
Engenharia de Automação
Analise as asserções a seguir e a relação proposta entre elas.
I - Na robótica móvel, em se tratando de algoritmos de planejamento de caminhos, são desejáveis como características: possibilidade de cálculo em tempo de execução; tratamento de obstáculos complexos; facilidade de implementação; lidar com incertezas
PORQUE
II - tais robôs podem ser usados em ambientes bem estruturados, esparsos, com iluminação uniforme e com poucas fontes de distúrbios.
A respeito das asserções, é correto afirmar que
I - Na robótica móvel, em se tratando de algoritmos de planejamento de caminhos, são desejáveis como características: possibilidade de cálculo em tempo de execução; tratamento de obstáculos complexos; facilidade de implementação; lidar com incertezas
PORQUE
II - tais robôs podem ser usados em ambientes bem estruturados, esparsos, com iluminação uniforme e com poucas fontes de distúrbios.
A respeito das asserções, é correto afirmar que
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050442
Engenharia de Automação
Em eletrônica/automação, interfaceando grandezas e/ou
componentes eletrônicos, é comum utilizar circuito integrado: amplificador operacional, desempenhando função
de transferência como entre Ventrada e Vsaída, conforme
o circuito apresentado. No referido circuito, o valor de R1
= 5 kΩ e R2 = 50 kΩ formam o elo realimentador do
amplificador operacional. Considere que o amplificador
operacional será ligado a uma fonte de tensão simétrica de
+Vcc = 10 V e –Vcc = –10V. [10V – 0 – 10 V].
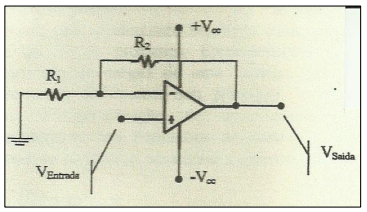
Assinale o valor da tensão Vsaída, quando a tensão Ventrada for igual a 200 mVcc.
Assinale o valor da tensão Vsaída, quando a tensão Ventrada for igual a 200 mVcc.
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050438
Engenharia de Automação
Na área de engenharia elétrica/automação, é possível encontrar circuitos eletroeletrônicos de controle de potência.
Circuitos dessa natureza podem usar dispositivos chamados tiristores, que representam um conjunto de componentes eletrônicos. Nesse sentido, para além dos componentes principais [tiristores], encontram-se componentes
acessórios usados nos disparos dos tiristores principais.
Relacione adequadamente os dispositivos aos seus respectivos símbolos.
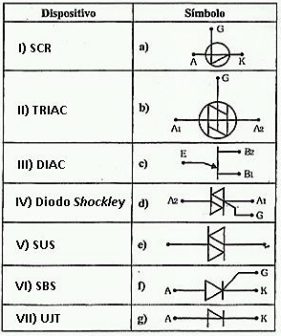
( ) SCR: Silicon Controlled Rectifier.
( ) TRIAC: Triode Alternative Current.
( ) DIAC: Diode Alternative Current.
( ) Diodo Shockley: Diodo de quarto camadas.
( ) SUS: Silicon Unilateral Switch.
( ) SBS: Silicon Bilateral Switch.
( ) UJT: Unijunction Transistor.
A sequência está correta em
( ) SCR: Silicon Controlled Rectifier.
( ) TRIAC: Triode Alternative Current.
( ) DIAC: Diode Alternative Current.
( ) Diodo Shockley: Diodo de quarto camadas.
( ) SUS: Silicon Unilateral Switch.
( ) SBS: Silicon Bilateral Switch.
( ) UJT: Unijunction Transistor.
A sequência está correta em
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
Itaipu Parquetec
Prova:
Instituto Consulplan - 2022 - Itaipu Parquetec - Profissional de Engenharia Jr - Automação |
Q4050430
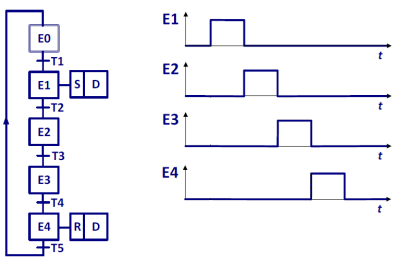
Automação
Considerando o diagrama grafcet apresentado e, adotando a mesma escala de tempo para as variáveis, o gráfico que representa a variável D é: