Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 155 questões
Em um controlador proporcional-derivativo, a magnitude da saída do controlador é proporcional à taxa de variação do sinal de erro na entrada.

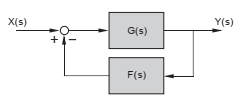
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue o próximo item com referência à análise de estabilidade.
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue o próximo item com referência à análise de estabilidade.
O controlador lógico programável possui interfaces com os sensores e atuadores do processo a ser automatizado. Esse tipo de controlador possui módulos de entrada e saída que tanto podem ser analógicos quanto digitais, de acordo com a natureza do processo e de suas variáveis.
O seguinte diagrama representa uma malha de controle com realimentação:
A função de transferência da malha é
Considere o sistema de controle abaixo.
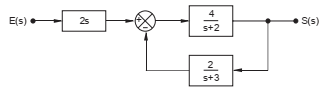
Os zeros da função de transferência do sistema valem
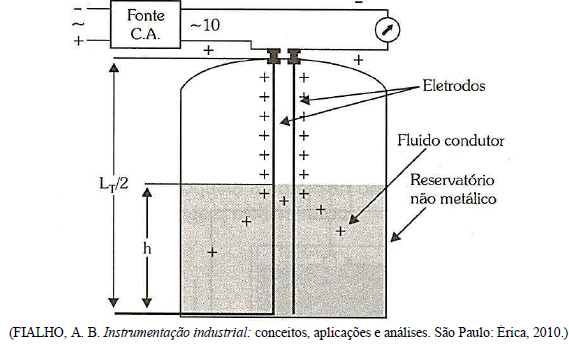
Em relação a um sistema de medição de nível contínuo utilizando eletrodos, conforme situação apresentada na figura, analise as afirmativas.
I - A altura do nível do reservatório é determinada com base na variação de corrente que circula pelos eletrodos.
II - A intensidade da corrente elétrica depende da variação da condutividade elétrica dos eletrodos.
III - A resistência elétrica desse sistema é diretamente proporcional à diferença entre o comprimento do eletrodo e o nível do fluido.
Está correto o que se afirma em
Entre esses sistemas, é instável o que está representado em:
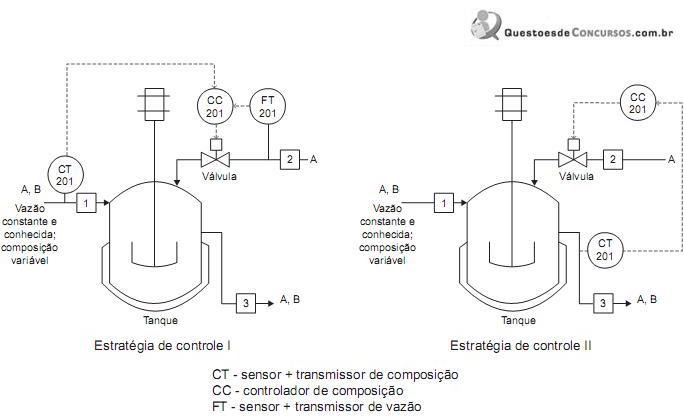
As estratégias de controle I e II apresentadas acima são tais que:
Dentre os três componentes desse compensador, a parte integral tem como principal atribuição
Considerando que, em condições de contorno iniciais nulas, um sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 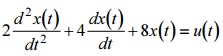 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
No domínio da frequência, esse sistema apresenta dois polos
complexos conjugados e um único zero finito.
Considerando que, em condições de contorno iniciais nulas, um
sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 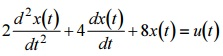 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
Considere a situação em que todas as variáveis do sistema
devam ser convertidas do modo contínuo para o discreto.
Nesse caso, a frequência mínima para amostragem do sinal
deverá ser superior a 0,40 Hz.
seguem acerca desse assunto.
seguem acerca desse assunto.
seguem acerca desse assunto.