Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 156 questões
Examine o circuito da figura abaixo.
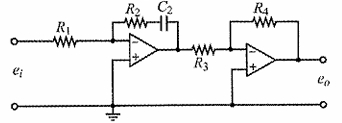
Circuito com amplificador operacional (Fonte: Ogata, 2015)
A figura acima mostra um controlador eletrônico proporcional-integral (PI) com amplificador operacional. A função de transferência do controlador é dada por:
Assim, as constantes KP e KI, em função de R1, R2, R3, R4 e C2, são iguais a:

Essa transformação
Entre estes sistemas, está o sistema de casamento automático do gerador de RF à bobina de plasma.
O sistema de controle RF por potência refletida utiliza o Módulo 1 para amostrar, em tempo real, uma fração da potência do sinal direto (, medida pelo Sensor 2) e uma fração da potência do sinal refletido (, Sensor 1) na linha entre o gerador e a rede de casamento. Então, calcula-se o coeficiente de reflexão e VSWR e um algoritmo aciona os atuadores do circuito de casamento (capacitores a vácuo/indutor variável) para minimizar e manter a carga efetiva próxima de 50 . Assim, maximiza-se a transferência de potência e estabiliza-se o plasma.
O módulo 1 é um
Utilize as informações a seguir para responder às próximas 3 (três) questões.
Em um multiplicador de dínodos discretos (Secondary Electron Multiplier), o íon se choca em um dínodo de conversão e libera elétrons secundários que são amplificados em vários estágios de dínodos até gerar um pulso detectável na saída do detector.
Este tipo de detector é utilizado em ICP-MS com analisador de massas por quadrupolo e realizam medidas chamadas de contagem de pulsos.
Durante a realização destas medidas, após o detector registrar um
pulso durante a detecção de um evento, ocorre um curto intervalo
de recuperação conhecido por tempo morto (dead time,  ), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
), sendo
o reflexo do limite de velocidade do circuito de detecção. Durante
este intervalo de tempo, o sistema fica temporariamente
indisponível e qualquer evento não será contado ou irá distorcer a
medida.
Considere o modelo não-paralisável para descrever a taxa de
eventos observados R (contagens por segundo - cps) em função da
taxa real de eventos r (cps) e o dead time (s):

Os parâmetros controlados são:
A respeito de controle PID, incluindo métodos de sintonização e os efeitos dos ganhos na estabilidade do sistema, julgue o item que se segue.
Técnicas de sintonização, como o método de Ziegler-Nichols, podem fornecer valores iniciais para os ganhos de um controlador PID que podem ser refinados posteriormente.
A respeito de controle PID, incluindo métodos de sintonização e os efeitos dos ganhos na estabilidade do sistema, julgue o item que se segue.
Aumentar o ganho derivativo em um controlador PID sempre resulta em uma melhora na estabilidade do sistema robótico.
Julgue o próximo item, relativo à teoria de controle.
Controles PID são inadequados para uso em sistemas não lineares, devido à sua estrutura linear.
Existem diversas técnicas para sintonia dos parâmetros desse tipo de controlador, a qual deve ser escolhida de acordo com as características do sistema como um todo.
Uma destas técnicas é o método
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Coluna 1
1. Tensão de linha.
2. Sequência de fase.
3. Gerador CA conectado em ∆.
4. Gerador trifásico conectado em Y.
5. Tensão de fase.
Coluna 2
( ) Tensão entre uma linha e um neutro de um gerador conectado em Y ou tensão entre duas linhas de um gerador em ∆.
( ) Os três condutores usados para conectar os terminais à carga do circuito são chamados de linhas.
( ) Ordem na qual as tensões senoidais produzidas por um gerador polifásico afetam a carga na qual estão conectadas.
( ) As tensões de fase e de linha são equivalentes e têm o mesmo valor que as tensões induzidas nos enrolamentos.
( ) Diferença de potencial que existe entre as linhas de um sistema monofásico ou polifásico.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Condutores de menor diâmetro podem ser usados para transmitir a mesma potência à mesma tensão, o que reduz a quantidade de cobre necessário (normalmente, cerca de 25% a menos) e, consequentemente, os custos de fabricação e manutenção das linhas.
( ) Linhas mais robustas são mais fáceis de instalar e suas torres de sustentação podem ser mais delgadas e mais espaçadas.
( ) Equipamentos e motores trifásicos apresentam melhores características de partida e operação que os sistemas monofásicos, pois a transferência de potência da fonte para a carga nos sistemas monofásicos está menos sujeita à flutuação do que nos sistemas trifásicos.
( ) Em geral, a grande maioria dos motores de grande porte é trifásica porque a partida não precisa de um projeto especial ou de circuitos externos adicionais.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
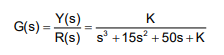
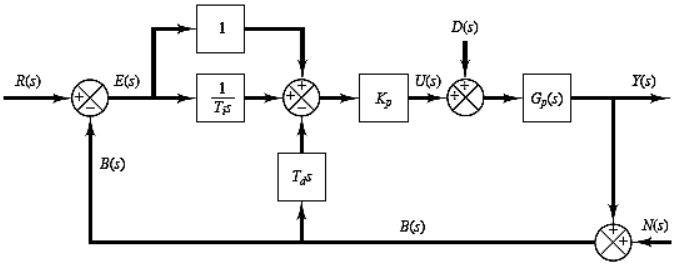
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?