Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 155 questões
O gráfico abaixo representa a resposta a uma dada alteração de carga.
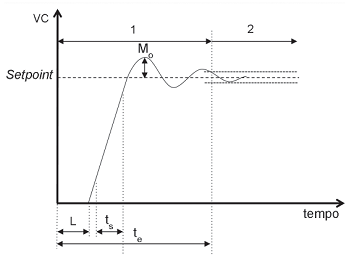
As inscrições nesse gráfico podem ser descritas:
A Figura abaixo é um diagrama de blocos representativo de um sistema de controle.
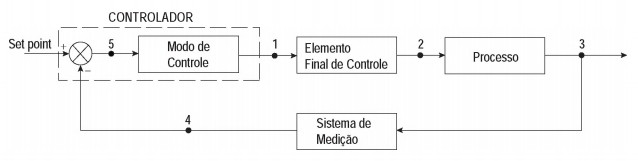
A variável manipulada e a variável controlada são aquelas presentes nos fluxos de sinal indicados, respectivamente, pelos
números
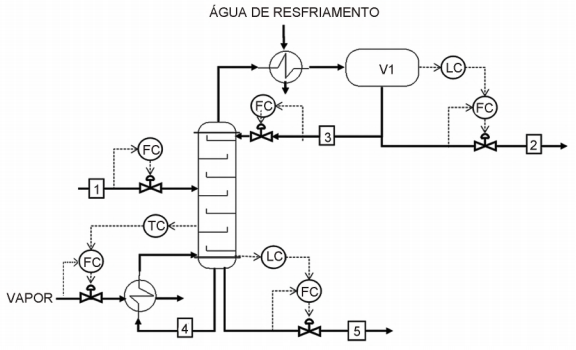
Na coluna representada na Figura, não havendo mudança de set points em relação à condição normal de operação, o resultado de um cenário de inundação da coluna tipicamente leva o operador a observar um
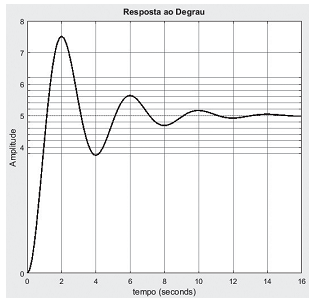
Dada a resposta ao degrau de um sistema dinâmico, determine os valores do sobressinal (Mp) e do tempo de acomodação (ta) para um critério de erro de 5%.
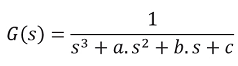
Utilize o método de Routh-Hurwitz para determinar os valores de a, b e c que garantem a estabilidade do sistema:
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
No projeto de controle por realimentação do vetor de
estados, os polos do sistema não podem ser alocados em
qualquer local, sendo restringidos pelo lugar geométrico
das raízes.
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
Um sistema de tipo 0 apresenta erro constante, em
regime permanente, em resposta a uma entrada em
degrau.
Acerca de controle linear, julgue o item a seguir.
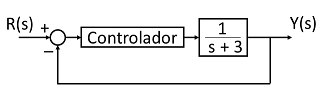
O controle derivativo deve ser usado sozinho para evitar-se o incremento do erro atuante.Qual é o erro em regime permanente do sistema de controle a seguir se o controlador utilizado for um do tipo Proporcional-Integral (PI) com constantes KP = 12, KI = 2, e a entrada for do tipo degrau?

Considere o sistema de controle em malha fechada, representado pelo diagrama de blocos, mostrado na figura seguinte.
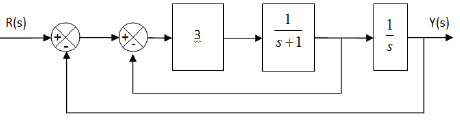
A função de transferência global Y(s)/R(s) pode ser representada
por
A questão refere-se ao sistema linear em malha
fechada, representado na figura seguinte:
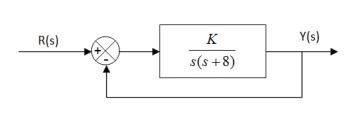
Quando é aplicado um impulso unitário, na entrada desse sistema, o sinal de saída y(t) assume a forma
y(t) = Me-σ t sen(ωt).
Assumindo que ω = 5 rad/s, o valor do ganho K será igual a